Анализ процесса регулирования
Для проведения моделирования системы следящего привода воспользуемся системой Matlab и ее подсистемой Simulink. Экспериментальная модель указана в приложении 1.
Задав параметры для экспериментальной модели из пунктов 2 и 4, исследуем реакцию системы на единичное ступенчатое воздействие (характеристика снята с датчика положения):
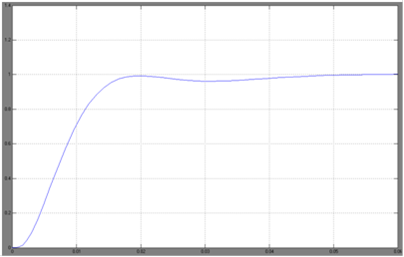
Рис 13. Реакция системы на единичное ступенчатое воздействие
Из представленного графика определяем значения времени переходного процесса и перерегулирования:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Заключение
Был произведен процесс проектирования электромеханического следящего привода исполнительной системы робота.
В процессе энергетического расчета, в соответствии с требованиями обеспечения энергетической возможности движения объекта по заданному закону движения с требуемыми зависимостями скоростей и усилий, были определены: двигатели, редукторы, силовые преобразователи. Работа следящего привода производится без тепловой перегрузки. Особые требования при аварийной остановки системы выполнены. Также произведен выбор информационных устройств, обеспечивающих заданную точность привода.
В процессе синтеза регуляторов следящего привода произведены расчет и настройка регуляторов положения, скорости, тока и определены коэффициенты датчиков обратной связи для обеспечения требований по точности, устойчивости и качеству переходных процессов к исполнительной системе робота.
Выбранные элементы в процессе проектирования обеспечивают работоспособность электромеханического следящего привода при заданных параметрах.
Статья в тему
Цифровые устройства и микропроцессоры
Современный этап развития вычислительной техники характеризуется разработкой микропроцессорных средств. Микропроцессоры (МП) используются в качестве элементной базы для реализации устройств обработки данных. При этом каждая сфера применения МП предъявляет свои специфические требования к и ...