Определение динамической моментной ошибки привода
При П-регуляторе положения статическая моментная ошибка равна 0. Но, при изменении момента появляется рассогласование.
Динамическая моментная ошибка вычисляется:
![]()
где ![]() - скорость изменения момента внешних сил,
- скорость изменения момента внешних сил,
![]() - коэффициент пропорциональности.
- коэффициент пропорциональности.
![]()
Наибольшая скорость изменения внешнего момента первого звена наблюдается при вертикальном положении вытянутого манипулятора:

При оценке скорости изменения момента, действующего на вал двигателя, необходимо учитывать передаточное отношение редуктора:
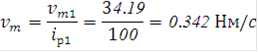
Наибольшая динамическая моментная ошибка на валу двигателя:
![]()
Составляющая погрешности привода, вызванная динамической моментной ошибкой:
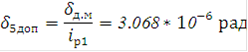
![]()

![]()
Полученные погрешности не превышают допустимых, точностные требования к исполнительной системе выполнены.
Статья в тему
Способы и информационные технологии получения знаний
Наступивший XXI век станет этапным для проникновения новых информационных технологий и создаваемых на их основе высокопроизводительных компьютерных систем во все сферы человеческой деятельности - управление, производство, науку, образование и т.д. Конструируемые посредством этих технологий интеллект ...