Синтез регуляторов следящего привода
Структура следящего привода приведена на рис. 5:
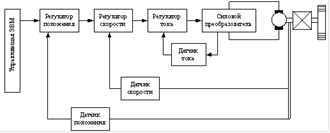
Рис 5. Структура следящего привода
Необходимо обеспечить следующие требования к динамическим свойствам привода:
. Динамическая ошибка привода ![]() в рабочем режиме движения должна быть не больше допустимой
в рабочем режиме движения должна быть не больше допустимой ![]() .
.
. Скоростная ошибка ![]() при движении рабочего органа с максимальной скоростью должна быть не более допустимой
при движении рабочего органа с максимальной скоростью должна быть не более допустимой ![]() .
.
. Время переходного процесса должно быть не более допустимого
![]()
. Необходимо обеспечить отсутствие перерегулирования при малом ступенчатом воздействии.
Реальное рабочее движение рабочего органа, создаваемое приводами манипулятора должно происходить со скоростью, не превышающей максимальную ![]() , и с ускорением, не превышающим максимальное
, и с ускорением, не превышающим максимальное ![]() при минимальном расстояние от оси вращения до рабочего органа
при минимальном расстояние от оси вращения до рабочего органа ![]() . Вместо реального движения в режиме слежения рассмотрим эквивалентное гармоническое:
. Вместо реального движения в режиме слежения рассмотрим эквивалентное гармоническое:
![]()
![]()
Оценка требуемых значений частот среза разомкнутого следящего привода и разомкнутых подсистем регулирования тока и скорости
Параметры контрольной точки: ![]() ) (из п. 4.3.1)
) (из п. 4.3.1)
![]()
Для обеспечения быстродействия и отсутствия перерегулирования используем П-регулятор положения.
Частоту среза вычисляем по формуле:

Для обеспечения требуемой длительности переходного процесса необходимо, чтобы выполнялось условие:
Скоростная ошибка привода при движении рабочего органа не должна превышать ![]() .
.
Должно выполняться условие:

Окончательно принимаем ![]() .
.
Для обеспечения минимальной технической сложности, достаточными запасами устойчивости и возможность работы без перерегулирования системы, частоту среза для подсистем регулирования тока и скорости принимаем:
![]() - частота среза подсистемы регулирования скорости,
- частота среза подсистемы регулирования скорости,
![]() - частота среза подсистемы регулирования тока.
- частота среза подсистемы регулирования тока.
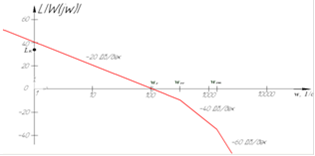
Рис 6. Желаемая ЛАЧХ разомкнутой системы
Синтез подсистемы регулирования тока
Структура подсистемы регулирования тока представлена на рис. 7:
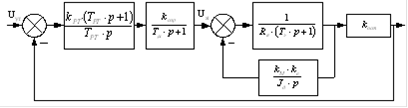
Рис 7. Структура подсистемы регулирования тока
Данная подсистема регулирования тока состоит из датчика тока, измеряющего ток в якорной цепи двигателя, регулятора тока, силового преобразователя, якорной цепи двигателя.
С учетом возможности форсирования по току, силовой преобразователь формирует среднее напряжения якоря ![]() при входном управляющем напряжение
при входном управляющем напряжение ![]() . Отсюда, коэффициент усиления силового преобразователя
. Отсюда, коэффициент усиления силового преобразователя ![]() .
.
Требуемое значение коэффициента обратной связи по току определяем по максимальному моменту и выходному сигналу цепи обратной связи по току ![]() :
:

Постоянную времени ПИ-регулятора тока примем равной электромагнитной постоянной двигателя: ![]() .
.
Определяем коэффициент усиления ПИ-регулятора тока:
![]()
Электромеханическая постоянная времени двигателя:

Чтобы система обладала необходимыми запасами устойчивости и качеством переходного процесса частота среза должна удовлетворять условию:
Статья в тему
Трасса прокладки волоконно-оптической линии передачи между пунктами Орел-Пенза
В
современном информационном мире каждые пять лет объём передаваемой информации
увеличивается вдвое, соответственно, встаёт задача передачи большого количества
информации с максимальной скоростью и высокой степенью достоверности на большие
расстояния и её обработка.
Ведущая
р ...