Силовой анализ манипуляционного механизма
Определяем момент сил, который должен развивать привод второго звена.
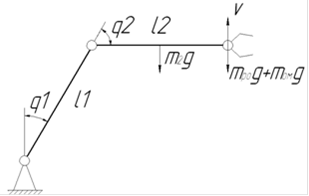
Рис 2. Схема сил, приложенных к «локтевому» звену.
Максимальный суммарный момент сил ![]() :
:
![]()
где ![]() - максимальный статический момент сил относительно оси вращения второго звена,
- максимальный статический момент сил относительно оси вращения второго звена, ![]() - максимальный динамический момент, действующий на второе звено,
- максимальный динамический момент, действующий на второе звено,
![]() - КПД механической передачи, принимаем
- КПД механической передачи, принимаем ![]() .
.
![]()
где g - ускорение свободного падения, максимальное значения ![]() при условии
при условии
![]() ,
, ![]() - масса второго звена,
- масса второго звена, ![]() - масса рабочего органа,
- масса рабочего органа, ![]() - масса объекта манипулирования
- масса объекта манипулирования
![]()
Максимальное значение динамического момента:
![]()
где ![]() - эквивалентный момент инерции второго звена:
- эквивалентный момент инерции второго звена:

![]()
![]()
Максимальная мощность механического движения второго звена:
![]()
Требуемую мощность двигателя второго звена определяем из условия:
![]()
Выбор электродвигателя привода второго звена
Выбираем электродвигатель по требуемой мощности:
Engelmotor GNM 4150A со следующими параметрами:
номинальная мощность ![]() , номинальная частота вращения
, номинальная частота вращения ![]() , номинальное напряжение якоря
, номинальное напряжение якоря ![]() , номинальный момент
, номинальный момент ![]() , номинальный ток якоря
, номинальный ток якоря ![]() , активное сопротивление якоря
, активное сопротивление якоря ![]() , момент инерции ротора
, момент инерции ротора ![]() , масса двигателя
, масса двигателя ![]() = 2.45 кг.
= 2.45 кг.
Определение требуемого передаточного отношения и марки редуктора
Передаточное отношение редуктора привода второго звена:

Выбираем редуктор HDUR - 20 - 80, имеющий массу ![]() . Передаточное число для данного редуктора
. Передаточное число для данного редуктора ![]() .
.
Проверка выполнения необходимых условий правильности выбора двигателя и редуктора
Проверяем выбранный двигатель по моменту и частоте вращения:

![]() .
.
Проверка показала, что подсистема «двигатель - редуктор» создает момент, не ниже требуемого.
![]()
![]()
Проверка показала, что подсистема «двигатель-редуктор» обеспечивает частоту вращения второго звена, не ниже требуемой.
Т.к. номинальный момент превышает требуемый момент, в тепловом расчете нет необходимости (двигатель не перегревается). Выбранные двигатель и редуктор пригодны для использования в приводе второго звена манипулятора.
Статья в тему
Связной передатчик 156 МГц, 10Вт, G2B, F1D
Радио-
это результат работ и открытий ряда учёных и инженеров, изучающих природу
электромагнитных процессов. В конце девятнадцатого века Генрих Герц, пользуясь
работами Максвелла, показал возможность излучения электромагнитной энергии
проводом, по которому протекает переменный т ...