Аппроксимация сигнала
Проведём аппроксимацию и построим график его модели.
Рисунок 3 - Исходный сигнал
Для этого разобьём первоначальный сигнал на 12 частей: 7 линейные и 5 параболических. Ниже приведены уравнения аппроксимирующих функций:
Из рисунков 3 и 4 видно, что аппроксимация проведена с достаточной точностью, и, следовательно, её можно использовать при дальнейших расчётах.
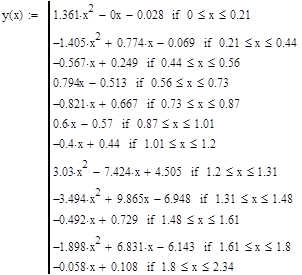
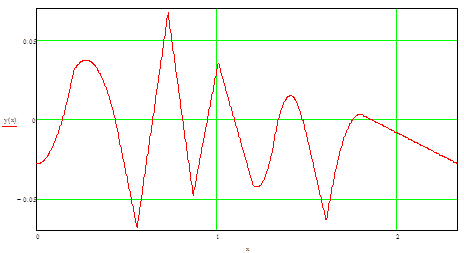
Рисунок 4 - График аппроксимирующей функции
Статья в тему
Ультразвуковой вискозиметр
Вязкость - свойство жидкостей оказывать сопротивление
перемещению одного слоя относительно другого. Количественно вязкость
характеризуется значением динамической вязкости или коэффициентом внутреннего
трения.
Характерной особенностью этого вида трения является
то, что оно наблюдае ...