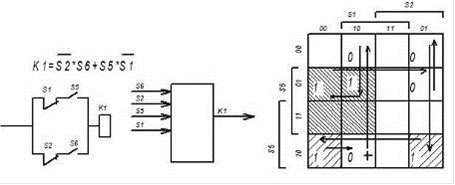
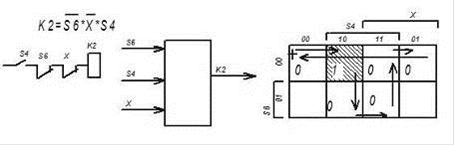
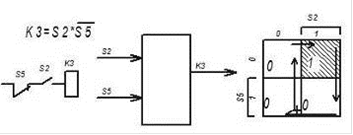
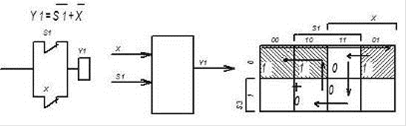
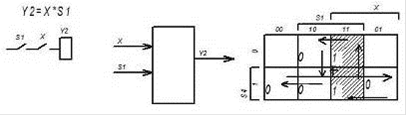
Синтез логических функций управления выходами
 Подробнее тут http://www.vindexexpo.ru
Подробнее тут http://www.vindexexpo.ru
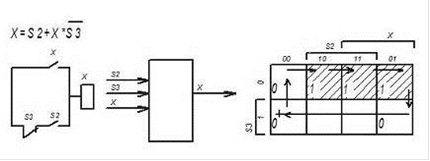
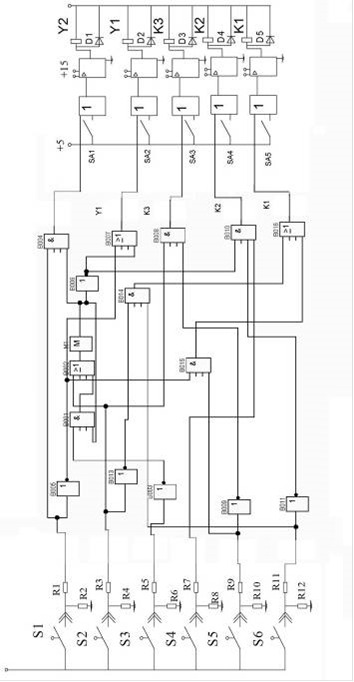
РКС
БЛС
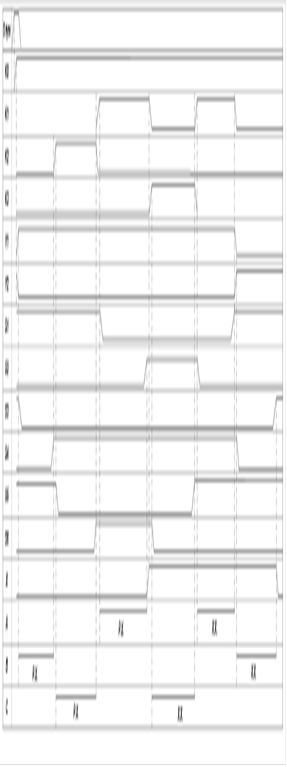
Циклограмма работы
Заключение
цикловой дискретный автоматический управление
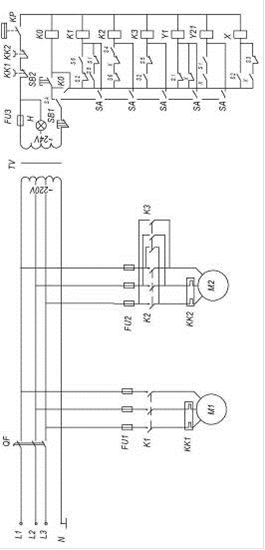
Проделав данную расчетно-графическую работу была спроектировала дискретная децентрализованная САУ с путевым контроллером.
В данной работе был построен граф функционирования, составлено уравнения при помощи матрицы Карно, с помощью построенных уравнений были получены схемы РКС и БЛС после чего была построена циклограмма функционирования данной системы.
Статья в тему
Графоаналитический расчет звукоизоляции ограждающих конструкций помещения
звукоизоляция защита информация безопасность
Аттестация объекта информатизации по требованиям безопасности информации
представляет собой комплекс организационно-технических мероприятий, в
результате которых подтверждается, что на аттестационном объекте выполнены
требования по безопасно ...