Измерение радиальной скорости
Радиальной скоростью Vr называют проекцию вектора V скорости цели на направление «измерительная система - цель». Т.к. Vr=dR/dt (где R - расстояние между измерительной системой и целью), в принципе Vr можно определить, дифференцируя показания радиодальномера, либо оценивая конечную разность дальностей на границах фиксированного интервала времени. Однако, повсеместно для измерения скорости Vr используется эффект Доплера а несущей частоте, т.к. при этом обеспечивается несравненно большая точность измерений.
Разность частот излученного и принятого колебаний называется доплеровским приращением частоты fд.
Если передатчик излучает гармонические колебания частоты fд, а приемник движется относительно него с переменной скоростью V(t) под углом Q(t) к линии передатчик - приемник, для большинства практических приложений зависимость f0r от скорости V(t) может быть с удовлетворительной точностью определена простым соотношением:
![]() ,
,
где Vr(t) - радиальная составляющая скорости
l - длина волны излучаемых колебаний
Основная трудность измерения fд в выше беззапросной радиолинии связана с необходимостью иметь в месте приема сигнал, частота которого с высокой точностью (до 10-11-10-10) равна частоте удаленного передатчика. Значительно проще измерять fд в радиолокационной или запросно-ответной системах, в которых передатчик и приемник находятся рядом.
Переход от связного к радиолокационному или запросно-ответному каналам, в которых радиоволны дважды проходят путь между измерительной системой и объектом, дает при прочих равных условиях удвоение приращения доплеровской частоты, т.е.
fд =2Vr(t)/l.
В частном случае прямолинейного равномерного движения, когда V(t)=V0=const, формула для fд упрощается и частота является функцией только угла Q.
![]()
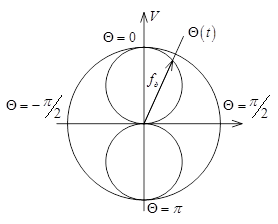
В общем случае эта зависимость характеризуется косинусной полярной диаграммой (рисунок со стр. 12). Из диаграммы видно, что как при сближении, так и при удалении объекта частота fд достигает максимума, когда вектор скорости направлен вдоль радиолуча (Q=0, Q=p) и fд =0 при ![]() . При практических расчетах удобно пользоваться формулой
. При практических расчетах удобно пользоваться формулой
![]() ,
,
где частота выражена в Гц, скорость в м/с, длина волны в см.
Определим порядок доплеровского приращения. Пусть V=103 м/с, l=2 см, Q=0, тогда ![]() Гц, при V=102 м/с fд =104 Гц.
Гц, при V=102 м/с fд =104 Гц.
Таким образом, в типовых задачах максимальные доплеровские приращения частоты лежат в диапазоне звуковых и ультразвуковых частот.
Статья в тему
Индикатор концентрации нитратов в продуктах
Нитраты (соли азотной кислоты) широко распространены в природе. Они
содержатся в почве, воде, входят в состав растений, являются продуктами обмена
веществ организма человека и животных.
Нитраты считаются одними из самых опасных химических соединений, так как
способны вызвать серьез ...