Радиопеленгация (измерение угловых координат)
При измерении угловых координат главную роль играет первое свойство ЭМВ - прямолинейность распространения. До последнего времени в радиопеленгаторах применялись остронаправленные антенны с вращающейся, качающейся или коммутируемой ДН в трёх основных вариантах:
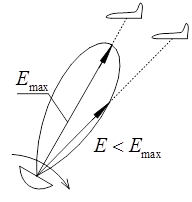
1. Установка оси антенной системы в направлении на цель по максимуму амплитуды сигнала данной цели. Этот метод характеризуется высокой энергетикой (Е® Еmax), но малой угловой чувствительностью (работа на «тупом» участке ДН)
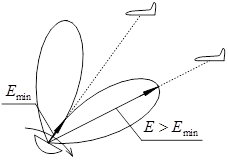
2. Установка оси антенной системы в направлении на цель по минимуму амплитуды сигнала данной цели. Для этого метода характерна низкая энергетика (Е® Еmin), но более высокая угловая чувствительность (работа на крутом участке ДН)
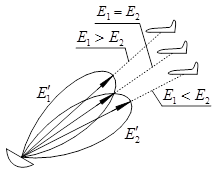
3. Коммутация двух смещенных в разные стороны от оси антенны ДН и установкой оси антенной системы в направлении на цель по равенству амплитуд сигналов данной цели для двух ДН. Этот вариант, известный как метод равносигнальной зоны, совмещает основные достоинства двух первых методов: Е® Еmax, работа на «крутом» участке ДН, т.е. достаточно высокая угловая чувствительность.
Работа всех этих пеленгаторов основана на сравнении амплитуд сигналов при относительно медленном вращении, качании или коммутации ДН антенны, что не позволяет определять направление на цель в каждый данный момент времени. Это ограничение существенно, т.к. при непрерывно возрастающих скоростях целей их угловое положение может на интервале измерения значительно измениться, а диаграмма обратного рассеяния (ДОР) имеет сложную многолепестковую форму, и при их движении одно из коммутируемых положений электрической оси антенны может совпасть с одним из максимумов, а другое - с одним из минимумов ДОР. При совпадении амплитуд сигналов будет допущена грубая ошибка.
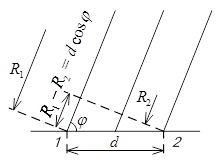
Это привело к быстрому вытеснению таких пеленгаторов моноимпульсными (или одновременными), позволяющими определять направление на цель в каждый данный момент. Основу их обычно составляют разностно-дальномерные системы, которые при большом удалении от них целей вырождаются в угломерные. Действительно, как следует из рисунка при R>>d разность дальностей R1 - R2=dcosY и не зависит от расстояния. Поэтому здесь пригоден любой метод измерения расстояния: синхронных часов, фазометра или частотомера. Системы пеленгации с фазометром получили название фазовых пеленгаторов.
Статья в тему
Усилитель широкополосный
Основной целью данного курсового проекта является разработка широкополосного усилителя. В настоящее время такие усилители могут применяться в осциллографии, в исследованиях прохождения радиоволн в различных средах, в том числе прохождения различных длин волн в городских условиях.
В задачу входит ан ...