Расчет геометрических размеров кабелей
ПРИЛОЖЕНИЕ А
Справочные данные диода
Согласно рассчитанным параметрам Uобр.макс.=73 В и Id=1.65A я выбрал в качестве вентилей кремнёвый диод типа КД202Г.
Основные параметры диода КД202Г:
Среднее за период значение прямого тока диода: 3.5 А;
- Наибольшее мгновенное значение обратного напряжения диода: 100 В;
Наибольшее постоянное обратное напряжение диода: 70 В;
Постоянный прямой ток диода: 9 А;
Максимально допустимая частота: 0.005 МГц;
Постоянное прямое напряжение диода: 0.9 В;
Диапазон рабочих температур: -60 +300.
Изобразим конструкцию диода:
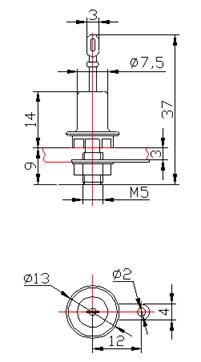
Рисунок A - Выпрямительный диод типа KD202Г.
ПРИЛОЖЕНИЕ Б
Справочные данные дросселя
Согласно расчетным параметрам минимальной доступной индуктивности дросселя фильтра Lдр.min= ![]() и тока намагничивания I=3,2A я выбрал дроссель типа D201T.
и тока намагничивания I=3,2A я выбрал дроссель типа D201T.
Главные параметры этого дросселя:
магнитопровод: ШЛ 5х5;
масса 40 г.
Индуктивность и номинальный ток:
- При параллельном соединении обмоток: 0,00015 Гн/3,2 А;
- При последовательном соединении обмоток: 0,0002 Гн/1,6 А ;
Изобразим структуру данного дросселя:
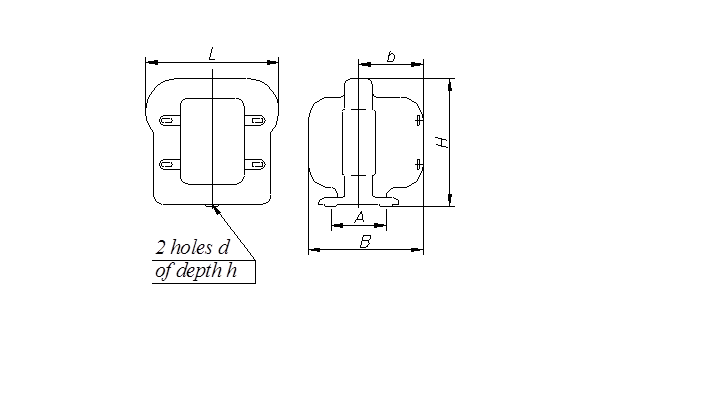
Рисунок Б - Дроссель типа Д201T
Размеры дросселя:
A=12мм h=4мм=25мм L=29мм=14мм d=M2,5
H=27,5мм
ПРИЛОЖЕНИЕ В
Справочные данные трансформатора
Согласно рассчитанным данным, я выбрал трансформатор типа ТПП 273-127/220-50. Электрические параметры трансформатора:
U1 = 220V - напряжение первичной обмотки
U2 = 127V - напряжение вторичной обмотки
I = 12A - входной ток
P = 960 Вт - мощность
f=50 Гц - частота
Габаритные размеры:
A = 50 мм= 81 мм= 92 мм= 10 мм = 88 мм
d = M5
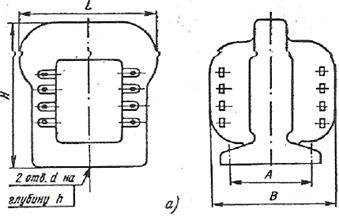
Рисунок В - Строение трансформатора типа ТПП 273-127/220-50
ПРИЛОЖЕНИЯ Г
Справочные данные фиксированных соединений
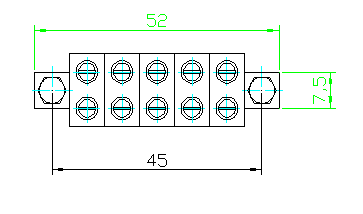
Рисунок D - Структура фиксированных соединений
Фиксированные соединения типа Б-324-4 предназначены для связи с помощью кабелей частей электрических цепей (питания, управления, сигнализации и др.) напряжением 100 В и частотой 50 Гц.
Статья в тему
Система регулирования печи
автоматизация печь
микропроцессорный контроллер
Объектом автоматизации является печь для сжигания
органических отходов. Как видно из рисунка 1, в топку печи через регулирующие
органы подаются отходы, воздух и газ. Причем наносить управляющие воздействия
можно при помощи регулирующих о ...