Передаточная функция в операторной форме
 =
=

АЧХ
![]()
ФЧХ


Переходная характеристика
![]()
![]()
 ( Из таблиц Лапласса)==
( Из таблиц Лапласса)==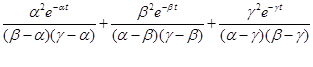

![]()

![]()
![]() [рад/с]
[рад/с] ![]()
![]() ,
, ![]() ,
, ![]()
![]()
![]()
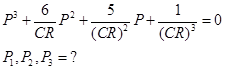
![]() =
=![]()
![]() ;
; ![]()
![]() - три действительных различных корня
- три действительных различных корня
![]() - знак р совпадает со знаком q
- знак р совпадает со знаком q
![]()
![]()
![]()
![]()
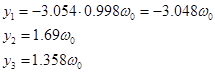
![]() [рад/с]
[рад/с]
![]() ,
, ![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
Перейти на страницу: 1 2
Статья в тему
Анализ деятельности ОАО ЗМУ КЧХК
В соответствии с учебным планом я походил производственную практику в ОАО «ЗМУ КЧХК».
Я был принят для прохождения производственной практики в штат лаборатории автоматизации на должность инженера по автоматизации и механизации производственных процессов (АМПП).
Совместно с руководителе ...