Коэффициенты ошибок по задающему воздействию
Ошибка системы может быть представлена в виде ряда:

Коэффициент С0 называют коэффициентом статической или позиционной ошибки; коэффициент С1 - коэффициентом скоростной ошибки, С2 - коэффициентом ошибки от ускорения.
В статических системах коэффициент С0 отличен от нуля. В системах с астатизмом первого порядка С0 = 0, С1 ≠ 0. В системах с астатизмом второго порядка С0 = С1 = 0, С2 ≠ 0.
Выполним вычисления (разложим в ряд) при помощи Mathcad:
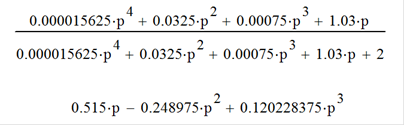
Коэффициент позиционной ошибки С0 = 0,515; коэффициент скоростной ошибки С1 = -0,249, коэффициент ошибки по ускорению С2 = 0,12.
Амплитуда ошибки 0,515.
Статья в тему
Светодиоды, их основные параметры и характеристики
Светодиоды,
или светоизлучающие диоды (СИД, в английском варианте LED - light emitting
diode) - полупроводниковый прибор, излучающий некогерентный свет при
пропускании через него электрического тока (рисунок 1). Работа основана на
физическом явлении возникновения светового излучения ...