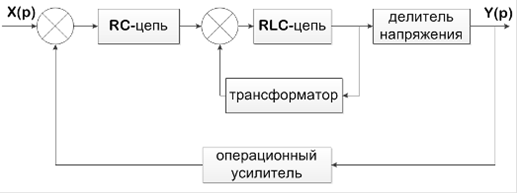
Функциональная схема системы автоматического управления
Функциональная схема САУ
Статья в тему
Центр электронных технологий и технической диагностики технологических сред и твердотельных структур
Целью
производственной практики является приобретение профессиональных навыков,
закрепление и углубление теоретических навыков в области проектирования и
технологии изготовления РЭС, применение полученных знаний при решении
конкретных задач проектирования РЭС и технологических процес ...