Структурная схема системы автоматического управления
Структурная схема САУ
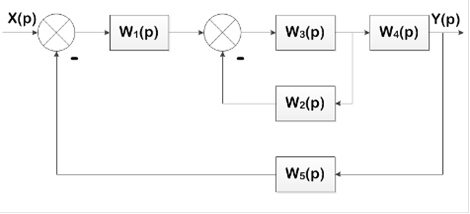
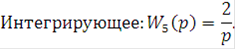
Передаточные функции звеньев системы:

![]()

![]()
Статья в тему
Динамический расчет системы автоматического управления
Система автоматического управления (далее по тексту САУ, или «система») предназначена для линейного перемещения горизонтального стола применительно к станкам фрезерной или координатно-расточной групп.
Состав системы
Блок-схема системы автоматического управления приведена на рис. 1, а к ...