Разработка коммутационной схемы соединений
Нижеприведенные преобразования исходной электрической схемы ИМС и схематический план размещения элементов и соединений между ними на подложке ИМС на рис. 2.1 позволяют:
упростить конфигурацию электрической схемы для уменьшения числа пересечений изгибов, получения прямых линий;
выделить на преобразованной схеме пленочные и навесные элементы;
обеспечить электрическую схему внутренними и внешними контактными площадками;
расположить элементы и соединения с учетом равномерного распределения мощности рассеяния;
расположить контактные площадки равномерно на поверхности подложки с учетом кратчайшего прохождения электрических сигналов с целью уменьшения их искажений.
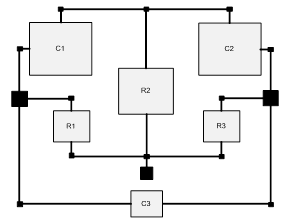
Рис. 2.1
Статья в тему
Оценка конструкторских и технологических параметров системы многослойных металлических межсоединений при разработке БИС
Транзистор
- одно из важнейших изобретений ХХ столетия, повлекшее за собой появление полупроводниковых
приборов и микросхем. Эти устройства стали основой электронных систем и привели
к проникновению электроники во все важнейшие для жизнедеятельности человека
отрасли - энергетик ...