Анализ влияния округления значений коэффициентов PID-регулятора на точностные параметры разрабатываемой системы управления
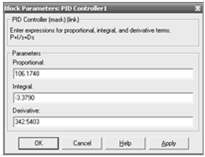
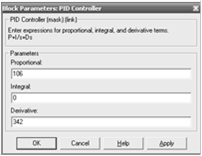
Строится модель двух систем с PID-регуляторами. В одном регуляторе (верхняя модель системы) коэффициенты принимают целые значения, а в другом (нижняя модель системы) принимают их настоящие дробные значения.
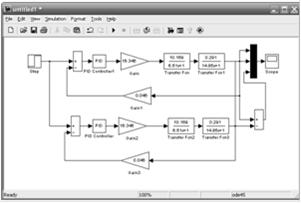
Устанавливаем параметры PID регуляторов
Определение влияние округления значений коэффициентов PID регулятора
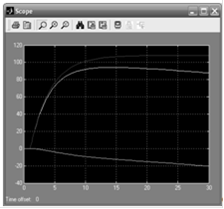
Разность между выходными параметрами двух систем
По результатам моделирования видно, что округление значений коэффициентов PID регулятора оказывает большое воздействие на систему.
Выводы по результатам разработки цифровой системы управления
По итогам разработки аналоговой системы управления были поставлены задачи улучшения качества проводимых экспериментов и достижения требуемой точности измерений.
Для выполнения поставленных задач была создана цифровая система управления, которая оценивалась по следующим качественным характеристикам:
период квантования по времени;
время переходного процесса;
величина перерегулирования;
вход в пятипроцентную зону;
коэффициенты PID-регулятора;
ЛАХ и ЛЧХ (ФЧХ)
степень рассеяния корней характеристического уравнения;
По итогам разработки цифровой системы управления можно сделать вывод: система устойчива.
Статья в тему
Усилительный каскад на биполярном транзисторе
Целью данной работы является расчет и проектирование усилительного каскада на биполярном транзисторе со следующими заданными параметрами:
1. Диапазон рабочих частот 2. Допустимые частотные искажения 3. Сопротивление источника сигнала и нагрузки 4. Коэфф ...