Проектирование направленного ответвителя
Направленный ответвитель ответвляет мощность с выхода усилителя мощности в цепь обратной связи (ОС). Выбор его коэффициента ответвления обеспечивает выполнение баланса амплитуд (БА).
В качестве направленного ответвителя можно использовать любую из изображенных на рисунке схем.
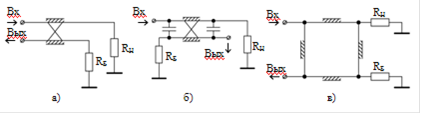
а) схема на основе линий с распределенной связью
б) схема на основе линий с емкостной связью
в) схема на основе линий со шлейфной связью
Схема на рис. а не требует навесных элементов, обладает небольшими габаритами, но требует высокой точности выполнения зазора между линиями.
Схема на рис. б использует навесные конденсаторы, но может иметь минимальные габариты при использовании свернутых полосковых линий.
Схема на рис. в имеет наибольшие габариты, но не требует высокой точности изготовления и использования навесных элементов.
Расчет выбранной схемы производится путем оптимизации ее параметров в соответствии со следующими критериями:
коэффициент отражения на входе не более -20 дБ;
коэффициент передачи в цепь ОС равен требуемому значению. Это значение вычисляется исходя из выполнения условия баланса амплитуд: коэффициент передачи в замкнутой петле обратной связи должен быть равен единице Кус Котв Кф Клз=1, где К коэффициенты передачи усилителя, ответвителя, фильтра и линии задержки. Если эти коэффициенты выразить в децибелах, то равенство приобретает вид Кус+Котв+Кф+Клз=0, откуда
Котв=-(Кус+Кф+Клз)
При этом следует взять запас на рассогласование в петле обратной связи 1 - 2Дб.
Пример
Определим требуемый коэффициент ответвления Котв =-(12ДБ-0.5Дб-0.1дб)=-10.5Дб. С учетом запаса в 1.5Дб Котв =-9Дб. Выберем схему ответвителя с распределенной связью. Оптимизацию выполним по следующим критериям:
- коэффициент отражения на входе не более -30Дб
коэффициент ответвления на частоте генерации равен -9Дб.
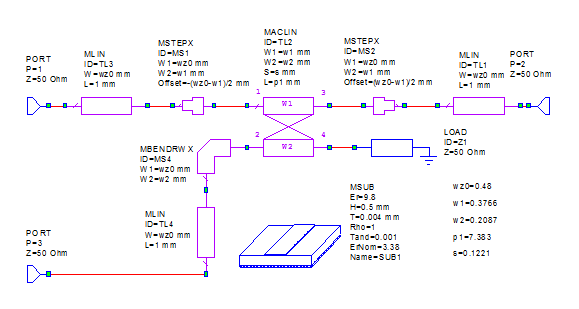
Рис. Схема направленного ответвителя.
Параметры направленного ответвителя после оптимизации приведены на рис.Х.
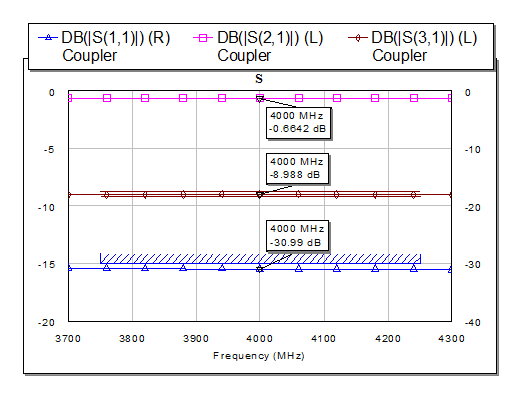
Рис. Частотные характеристики направленного ответвителя
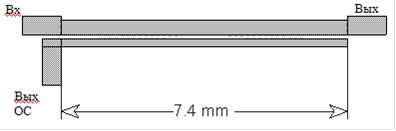
Рис. Топология направленного ответвителя
Статья в тему
САУ громкостью звука в аудитории
Цель курсового проекта - разработать систему автоматического управления громкостью звука в аудитории. Необходимо обеспечить заданные запасы устойчивости по амплитуде и по фазе, при заданных показателях качества. При необходимости САУ следует скорректировать и вычислить параметры корректирующего устр ...