Анализ аналоговой линейной электрической цепи
Табличное представление исходных данных:
|
№ варианта |
№ бригады |
Z1 |
Z2 |
Z3 |
Z4 |
Z5 |
Z6 |
Z7 |
Z8 |
№схемы |
|
09 |
3 |
R |
2pL |
R |
R |
2pL |
R |
R |
R |
3 |
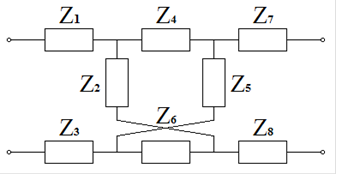
Рисунок 2.1 - Схема исходного аналогового фильтра-прототипа
Известно соотношение постоянной времени цепи
![]()
Статья в тему