Анализ проводного подсоединения последовательной цепочки датчиков к МК
С точки зрения применения проектируемой СЦКТ одним из важных аспектов является максимальная длина соединительных проводов (СП), при которой система измерения температуры сохраняет метрологические характеристики (МХ) в рамках ТЗ. По соединительным проводам передается измерительный ШИМ сигнал (рис. 5.1).

Рис. 5.3 Схема последовательного включения датчиков температуры и МК в СЦКТ.
На рисунке 5.3:
СП - соединительный провод,
УУ - устройство управления, которое состоит из МК, дисплея, клавиатуры,
AD1 AD5 - группа последовательно включенных датчиков TMP06B.
Известно, что с увеличением длины провода его емкость увеличивается. Емкостные параметры СП влияют на форму передаваемого сигнала. Следовательно чем длиннее провод, тем передаваемый сигнал будет более искажен.
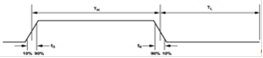
Рис. 5.2 ШИМ сигнал датчика TMP06B
На рисунке 5.2 представлен измерительный ШИМ сигнал, который поступает по СП от датчика к датчику и от датчиков в МК. Очевидно, что при увеличении длинны проводов, МХ системы будут зависеть от искажения фронта и среза сигнала. Из технического описания(ТО) датчика TMP06B известно, что при емкостной нагрузке 100 пФ, резистивной нагрузке 10кОм и напряжении 5.5 В, типовое значение величины среза и фронта соответственно равно 30 нс и 50 нс [7].
На рисунке 5.2 представлен, взятый из ТО датчика TMP06B, график зависимости длительности времени фронта/среза от емкостной нагрузки линии передачи сигнала.
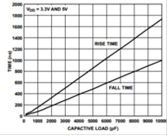
Рис. 5.3 График зависимости времени фронта/среза от емкостной нагрузки линии передачи
Согласно международному стандарту коммуникационных кабельных сетей ISO/IEEC11801, нормируемая длина линии составляет 100м между сегментами сети, при максимальной емкостной нагрузке 5.6 нФ [8].
Из рисунка 5.3 видно, что при емкостной нагрузке С равной 5.6 нФ, длительность фронта Tф = 920 нс, а длительность среза Tc = 520 нс. Тогда, используя линию длиной 100м, можно оценить увеличение длительности ШИМ сигнала приблизительно на 1.5мкс.
Используя формулу (7) из раздела 4, получим:
|Δд|=(751* Δт )/TL * (1+TH/TL), (5.1)
Где Δд - погрешность дискретизации,
TL - длительность сигнала низкого уровня (рис. 5.2),
TH - длительность сигнала высокого уровня (рис. 5.2),
Δт - аддитивная составляющая погрешности счета.
Ниже представлен расчет Δт.
Формула расчеты аддитивной составляющей выглядит так:
Δт =Tи+To, (5.2)
Где To - период опорного импульса(2 мкс, см. разел 4),
Ти - суммарное время "завала" фронтов/срезов сигнала от группы датчиков.
Расчет оценочного предельного значения Ти (из формулы 5.2) выглядит следующим образом:
Пороги срабатывания каждого датчика в цепи, при поступлении импульсного сигнала в ТО датчика TMP06B не описаны. Следовательно не известно на сколько меняется длительность информационного интервала ШИМ сигнала (Ти) при прохождении через датчик(при использовании группы датчиков).
Статья в тему
Автоматизация управление асинхронным электроприводом
Автоматизация - это комплексная конструктивно-технологическая задача
создания принципиально новой техники на базе прогрессивных процессов обработки,
контроля, сборки.
Автоматизация технологических процессов есть совокупность мероприятий по
разработке новых технологических проце ...