Построение ЛАЧХ корректирующего устройства
Частоты сопряжения для ЛАЧХ корректирующего устройства:
λ1=25; λ2=30; λ3=35; λ4=65; λ5=80; λ5=90; λ6=150
 (55)
(55)
Была получена передаточная функция последовательного корректирующего устройства, которое будет влиять на быстродействие системы, однако моей системе требуется параллельное корректирующее устройство, т.к. необходимо повышать точность.
Для перехода от последовательного КУ к параллельному воспользуемся формулой перехода
WПАРКУ=WУ*(WПОСКУ-1) (56)
где: WУ - передаточная функция устройства, требующего коррекции;
WПОСКУ - передаточная функция последовательного корректирующего устройства.
Определимся устройством, которому требуется коррекция. Просмотрев список устройств в системе можно прийти к выводу, что наиболее инерционными являются ДПТ и гидропривод. Однако коэффициент передачи гидропривода значительно меньше коэффициента передачи двигателя, таким образом, коррекции должен быть подвержен двигатель. Физически это трудно осуществимо, поэтому будем корректировать усилитель, т.к. он непосредственно воздействует на двигатель.
Передаточная усилителя:
![]() (57)
(57)
Таким образом:
 (58)
(58)
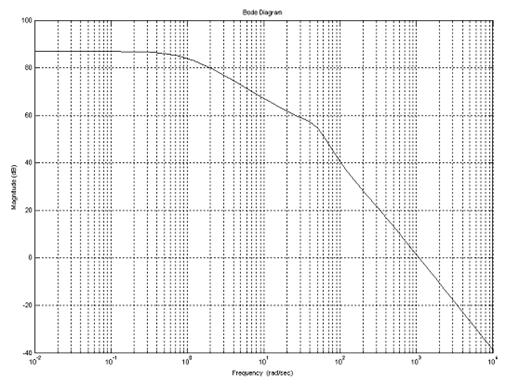
Рисунок 14 - ЛАЧХ корректирующего устройства
Статья в тему
САПР устройств промышленной электроники
Измерению
температуры придается большое значение в различных отраслях промышленного
производства. Температура является наиболее массовым и, зачастую, решающим
параметром, характеризующим различные технологические процессы
металлургической, химической, энергетической и других видов пр ...