Построение АЧХ
Определение амплитуды входного сигнала и показатель колебательности системы автоматического в целом осуществляются по графику амплитудно-частотной характеристики дискретной системы автоматического регулирования.
Приведем исходную аналоговую систему к дискретной, введением микропроцессора. Частота опроса датчика составляет 1000 раз в секунду (период составляет T=0.001). Данная величина обусловлена необходимой точностью позиционирования захвата. Этого можно достичь лишь путем своевременного оповещения исполнительного органа о текущем состоянии системы.
Проведем z-преобразование, для чего воспользуемся функциями пакета Matlab. Реализация такого алгоритма требует введения экстраполятора нулевого порядка ‘zoh’ из функции c2d.
Получаем передаточную функцию разомкнутой системы:
 (49)
(49)
Перейдем к псевдочастоте, для чего введем замену:
![]() , (50)
, (50)
с учетом, которой получаем:
 (51)
(51)
Перейдем к псевдочастоте, используя замену ![]() , получаем
, получаем
 (52)
(52)
Амплитудная характеристика получается путем внесения реальной и мнимой части (52) в формулу:
![]() (53)
(53)
Исходя из (53), получен график АЧХ (рисунок 8), кроме того, использовалась функция bode(Wz), где Wz - передаточная функция разомкнутой цифровой системы.
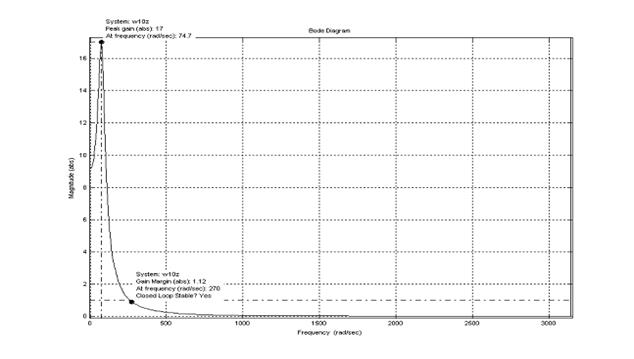
Рисунок 9 - АЧХ замкнутой системы
Из графика АЧХ, определяем необходимые показатели:
максимальная амплитуда АMAX=17
показатель колебательности
Статья в тему
Корректировка номиналов тонкоплёночных элементов гибридных интегральных схем
Сопротивление
пленочного резистора определяется па формуле
R=ρ0l/b=
ρ0Kф (1.1)
где
ρ0 - удельное
поверхностное сопротивление резистивной пленки;
l,
b - длина и ши ...