Выбор захвата робота
В таблице 1 приведены данные необходимые для расчета.
Эквивалентная динамическая нагрузка передачи Q определяется как наибольшее значение из двух эквивалентных нагрузок Q1 и Q2, действующих на каждую из гаек.
На передачу, собранную с силой предварительного натяга, со стороны первой гайки действуют осевые силы Qi1 (i=1,2, .,k), а со стороны второй гайки осевые силы Qj2 (j=1,2, .,k).
Продолжительность действия сил в процентах к общему времени - ti1 и tj2, соответствующее им число оборотов винта (гайки) - ni1 и nj2.
Силы, действующие на первую гайку обозначим q'i1 и q'j2, на вторую, соответственно, q''i1 и q''j2.
Силы, действующие на гайку определяются по формуле:
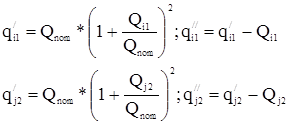 (24)
(24)
Эквивалентная нагрузка на первую гайку:
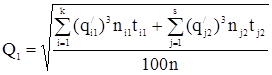 (25)
(25)
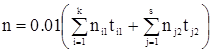 (26)
(26)
где: n - среднее число оборотов при постоянной нагрузке и переменной скорости вращения, об/мин.
Аналогично находим эквивалентную нагрузку Q2, действующую на вторую гайку. Силы предварительного натяга определяются по формуле:
![]() (27)
(27)
где: Mxx - момент холостого хода, Нм;- расчетный диаметр передачи, мм;ш - радиус шарика, мм.
На передачу, собранную с предварительным натягом QН= 6.7 кН, действуют со стороны первой гайки осевые силы Q11=7 кН, Q21=10 кН, Q31=5 кН, Q41= 0.3 кН, а со стороны второй гайки осевые силы Q12= 4 кН, Q22= 3 кН. Угловая скорость вращения передачи составляет 25 рад/с, т.е. n=30*25/π=239![]() .
.
Эквивалентная нагрузка на гайку:
 (кН)
(кН)
Статическая грузоподъемность C=17.7 кН. Т.о. долговечность 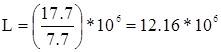 оборотов.
оборотов.
Статья в тему
Трасса прокладки волоконно-оптической линии передачи между пунктами Орел-Пенза
В
современном информационном мире каждые пять лет объём передаваемой информации
увеличивается вдвое, соответственно, встаёт задача передачи большого количества
информации с максимальной скоростью и высокой степенью достоверности на большие
расстояния и её обработка.
Ведущая
р ...