Расчет влияния помехи общего вида
Влияния помехи общего вида проведем согласно схеме приведенной на рисунке 9.1. На данной схеме Спар,Rиз - соответственно паразитная емкость и сопротивление изоляции чувствительного элемента ТПС относительно его корпуса, который всегда заземляется.
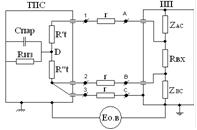
Рисунок 9.1- Схема, поясняющая действие помехи общего вида Ео.в
Точка D, эквивалентная точка приложения Rt к корпусу ТПС, разбивает Rt на две составляющие R’t и R’’t , R’t+ R’’t= Rt. Местонахождение точки D относительно Rt определяет долю помехи Ео.в , приходящую на вход ИП. Rвх - входное сопротивление усилителя , ZАС , ZВС - эквивалентные комплексные сопротивления изоляции и паразитные емкости в точках А и В отношении только заземленного корпуса ИП. Ео.в напряжение между точками ИП и ТПС. Как правило RАС ≈ RВС ≈ (0.1÷10)ГОм и САС ≈ СВС ≈ (0.1÷10) нФ. Эквивалентная схема действия помехи общего вида представлена на рисунке 9.2а. Откуда видно, что с учетом того r, Rt « Zиз, ZАС, ZBC, Rвх, влияние помехи Ео.в будет наибольшим (UАВ - максимально) если точка D займёт положение между r и Rt,см. рисунок 6.2б. С учетом отмеченных неравенств можно перейти к схеме , представленной на рисунке 6.2в, по которой оценим влияние помехи Ео.в . В данном случае напряжение UАВ - это напряжение на сопротивлении Rt , тогда:
![]()
С учетом тем, что: ![]()
![]() ,
,
можно записать следующее выражение:
![]()
![]() .
.
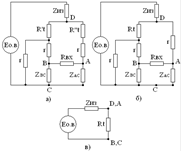
Рисунок 9.2 - Эквивалентные схемы для оценки влияния помехи Ео.в
В нашем случае, Rиз=Rпар =500 кОм; Спар=1 нФ; ω=314 с-1;Ео.в=10 В;Rt=50 Ом,
Тогда получим: Спар· Rпар=10-9·3.14·500·103=0,157 с. « 1.
![]()
Для этого напряжения от полезного напряжения, на входе ДУ:
![]()
Составляет: 1/64.2 = 1.55 (Это не допустимо. Заданная погрешность δ < 0.2%).
Статья в тему
Исследование радиотехнических сигналов
Одна из важнейших задач радиотехники заключается в осуществлении связи на большие расстояния с помощью излучения электромагнитных волн. В настоящее время круг применений радиотехники необычайно расширился. Радиотехника применяется в радиосвязи, телевидении, радиоуправлении, радиолокации, радионавига ...