Оценка погрешности позиционирования РО
При изготовлении детали важное значение имеет точность позиционирования РО ПР. На практике важно оценить точность позиционирования в декартовой системе координат.
Для вычисления ошибок вдоль осей декартовой системы координат на ![]() -ом шаге дискретизации по времени, зная ошибки по обобщенным координатам, можно воспользоваться формулой
-ом шаге дискретизации по времени, зная ошибки по обобщенным координатам, можно воспользоваться формулой
![]() ,
,
где![]() - вектор-столбец ошибок в декартовой системе координат на
- вектор-столбец ошибок в декартовой системе координат на ![]() -ом шаге дискретизации по времени;
-ом шаге дискретизации по времени;
![]() - матрица Якоби на
- матрица Якоби на ![]() -ом шаге дискретизации по времени;
-ом шаге дискретизации по времени;
![]() - вектор-столбец обобщенных координат на
- вектор-столбец обобщенных координат на ![]() -ом шаге дискретизации по времени;
-ом шаге дискретизации по времени;
![]() - вектор-столбец ошибок по обобщенным координатам на
- вектор-столбец ошибок по обобщенным координатам на ![]() -ом шаге дискретизации по времени.
-ом шаге дискретизации по времени.
Ошибки по обобщенным координатам в ![]() й момент дискретизации вычисляются по формуле:
й момент дискретизации вычисляются по формуле:
![]()
где  - эталонное положение в обобщенной системе координат;
- эталонное положение в обобщенной системе координат;
 - реальное положение в обобщенной системе координат.
- реальное положение в обобщенной системе координат.
Величины ошибок по обобщенным координатам приведены на листах 8 и 9 графической части.
Матрица Якоби вычисляется по формуле
 ,
,
где ![]() ,
, ![]() ,
, ![]() - функции, решения прямой задачи кинематики:
- функции, решения прямой задачи кинематики:
Матрица Якоби равна:
Величины ошибок по осям декартовой системе координат, связанной с основанием робота, приведены на листах 8 и 9 графической части.
В ![]() -ый момент дискретизации по времени отклонение вычисляется по формуле
-ый момент дискретизации по времени отклонение вычисляется по формуле ![]() .
.
Как следует из графиков, отклонение рабочего органа от заданного при движении вдоль контура кулачка не превышает 0,1 мм, что удовлетворяет требуемой точности.
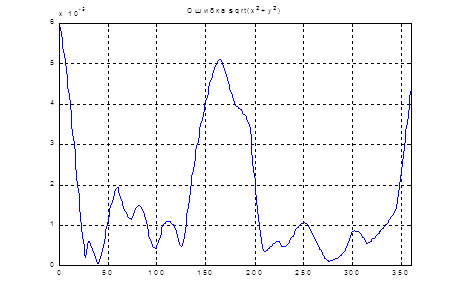
Рисунок 6.19 График отклонения траектории движения рабочего органа от эталонной траектории при отработке контура кулачка
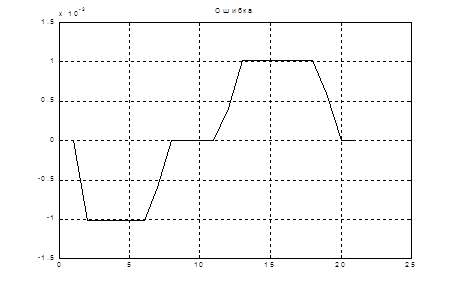
Рисунок 6.20 График отклонения траектории движения рабочего органа от эталонной траектории при подходе к поверхности резания
Статья в тему
Синтез блока управления операции сложения в арифметико-логическом устройстве
Абстрактный синтез включает в себя разработку алгоритма работы автомата и
составление его формального описания в виде автоматных таблиц или в виде графа
переходов. Алгоритм наиболее удобно и наглядно представлять в виде блок-схем.
Разработка алгоритмов и блок-схем является наиболее тв ...