Линеаризация математической модели ПР
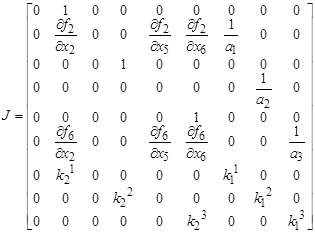
Линеаризуем уравнение (4.7), описывающее ОУ по методу, представленному в разделе 4.4. Для этого найдем матрицу Якоби вектор-функции
![]() =
= 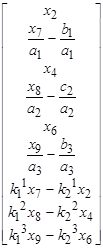 ,
,
входящей в уравнение (4.7)
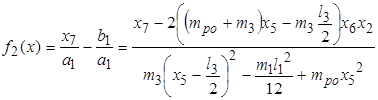
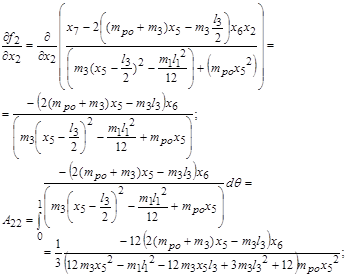
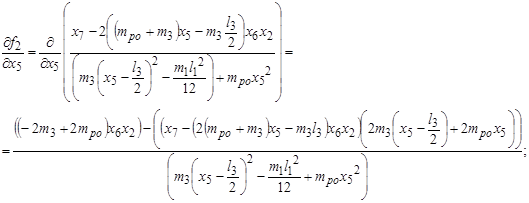
![]()
 ;
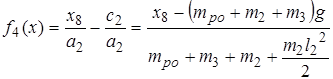
;
Где ![]() ;
;
 ;
;
![]() ;
;
 ;
;
![]() ;
;
 .
.
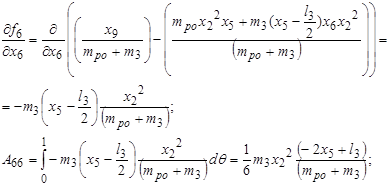
Найдем матрицу ![]()
 =
= 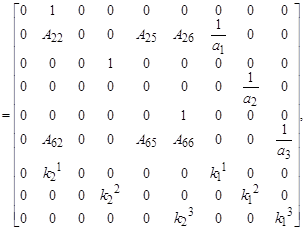
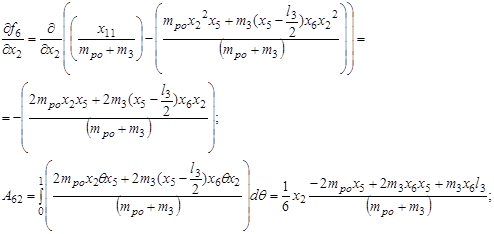
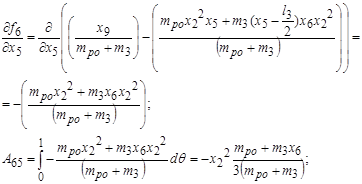
Где
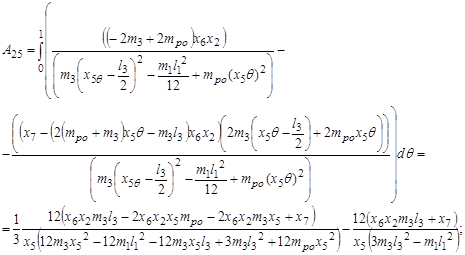
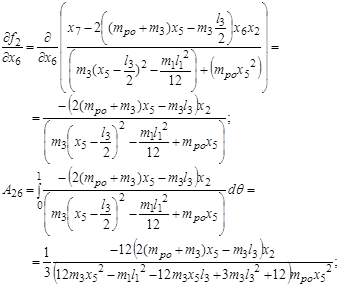
![]()
Таким образом, объект управления описывается линейным уравнением на каждом шаге квантования
![]() ,
,
Где 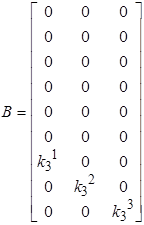
Статья в тему
Системы связи с подвижными объектами
Рассматривается прямолинейный диспетчерский участок железнодорожной магистрали (рис 1)
Рисунок 1. Диспетчерский участок
Использованные следующие аббревиатуры: ТВЛ - два провода трехфазной высоковольтной линии, ВЛС - воздушная линия связи, ДВ и ОВ - соответственно двух- и однопроводной волноводы. ...