Математическая модель манипулятора в пространстве состояний
Для всего робота при одновременном выполнении движений по различным степеням подвижности необходимо совместно рассматривать движение манипулятора и системы приводов, включающей двигатели и передачи по всем степеням подвижности. К уравнениям движения манипулятора надо добавить уравнения для системы приводов, связывающие силы и моменты, развиваемые приводами (они стоят в правых частях уравнений движения манипулятора) с управляющими воздействиями, поступающими из системы управления на приводы.
Уравнения, описывающие динамику манипулятора и двигателя, получены выше.
Поскольку подвижные элементы робота считаются жестко связанными с корпусом и валом двигателя§, частота вращения двигателя линейно связана с обобщенной скоростью звена. Поэтому в полную ММ “электродвигатель-манипулятор” из системы уравнений, описывающей электродвигатель (4.5), войдет только по одному уравнению, описывающему динамику формирования момента в соответствующем сочленении
![]()
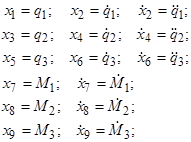
Второе уравнение, описывающее динамику формирования скорости вращения, полностью совпадет с аналогичным уравнением механической основы робота. Опишем динамику всей электромеханической системы уравнениями в пространстве состояний. Введем переменные состояния:
Представим уравнение (4.4) в виде:
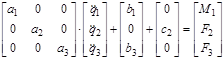 ,
,
Где

С учетом введенных обозначений система уравнений в пространстве состояний, описывающая манипулятор, оснащенный электродвигателями постоянного тока, имеет вид:
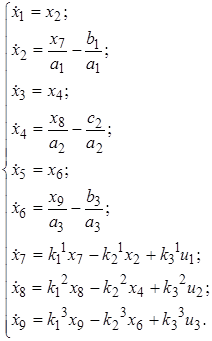 (4.6)
(4.6)![]()
где ![]()
![]() ,
, ![]() номер сочленения.
номер сочленения.
В векторно-матричном виде система уравнений (4.6) записывается:
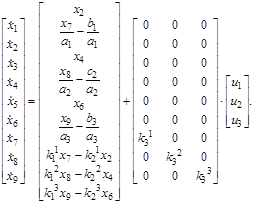 (4.7)
(4.7)
Полученная система уравнений, описывающая объект управления в пространстве состояний, имеет девятый порядок. Система обладает существенными нелинейностями, которые наряду с большой размерностью затрудняют синтез. В следующем разделе предлагается метод позволяющий синтезировать дискретно-непрерывную систему управления без необходимости упрощения математической модели, что увеличивает точность позиционирования ПР рабочего органа.
Статья в тему
Сирена двухтональная сенсорная
Среди
огромного разнообразия схемотехнических решений сирен, которые предлагает
радиотехническая промышленность, особое место занимают недорогие сенсорные
схемы дверных звонков, позволяющие на довольно простой и надёжной отечественной
элементной базе реализовать функционально законче ...