Типовые структуры систем управления промышленными роботами
Система управления ПР в общем случае должна обеспечивать [16]:
- прием и интерпретацию команд, поступающих от человека-оператора и управляющей системы более высокого уровня;
управление движением исполнительного механизма робота, которым, как правило, является манипулятор, в соответствии с заданной программой и состоянием окружающей среды;
формирование команд на обслуживание роботом технологического оборудования;
контроль за выполнением технологической операции на данном роботизированном технологическом модуле.
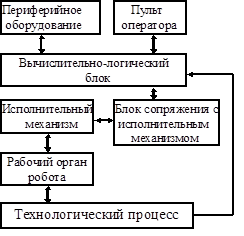
Рисунок 3.2 Обобщенная структурная схема системы управления ПР
На рисунке 3.2 приведена обобщенная структурная схема системы управления ПР. Ядром системы является вычислительно-логический блок, реализующий требуемые законы функционирования ПР и его взаимодействие с технологическим оборудованием, а также координирующий работу всех составных блоков системы. В современных системах управления ПР данный блок выполняют на базе одной или нескольких микроЭВМ или микропроцессоров (МП).
Блоки сопряжения в рассматриваемой структуре предназначены для подключения приводов исполнительного механизма робота к системе, а также для обмена информацией дискретного вида с технологическим оборудованием и содержит соответствующие преобразовательно-усилительные элементы. Пульт оператора используют для задания режимов работы системы управления, формирования команд ручного управления, индикации контрольной и т.д. В состав периферийного оборудования входят устройства, предназначенные для подготовки, хранения и загрузки в СУ ПР управляющих программ, а также для поддержания режимов диагностики и наладки.
В вычислительно-логическом блоке формируется в цифровом виде сигналы управления приводами робота. В блоке сопряжения с исполнительным механизмом цифровые сигналы преобразуются в аналоговую форму, усиливаются по мощности и поступают на исполнительные двигатели приводов. Здесь же осуществляется подключение датчиков обратной связи приводов, информация с которых используется при формировании управляющих сигналов на приводы роботов.
Управление приводами робота является далеко не единственной функцией, возлагаемой на его систему управления, и реализуется такое управление во взаимодействии в основном двух блоков системы.
Рассмотренная структура определяет аппаратный состав СУ ПР и функциональное назначение основных ее блоков. Другой подход к разбиению системы управления на отдельные подсистемы связан с особенностями построения её алгоритмического обеспечения. Он предполагает разделение общей задачи управления действиями робота на несколько самостоятельных подзадач или уровней управления. В общем случае в робототехнических системах принято выделять три иерархических уровня управления (рисунок 3.3).
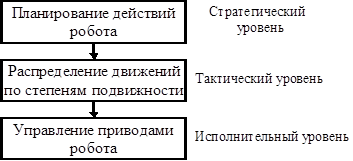
Рисунок 3.3 Иерархические уровни управления
На верхнем (стратегическом) уровне планируется траектория движения рабочего органа ПР, соответствующая выполнению роботом предписываемой ему технологической операции, например, определяются координаты точек рабочего пространства, в которые последовательно должен перемещаться рабочий орган робота при выполнении технологических операций. На этом уровне могут решаться также задачи, связанные с адаптацией робота к меняющимся условиям его работы.
Статья в тему
Демаскирующие признаки сигналов
Информационная безопасность, как и защита информации, задача комплексная, направленная на обеспечение безопасности, реализуемая внедрением системы безопасности.
Проблема защиты информации является многоплановой и комплексной и охватывает ряд важных задач. Проблемы информационной безопасности постоя ...