Моделирование антенной решетки
. В программе MMANA строим антенную решетку, для начала нужно подобрать координаты расположения антенны в пространстве таким образом, что бы соответствовало техническим требованиям данным преподавателем.
Ширина главного лепестка ДН в горизонтальной плоскости: 65º
Ширина главного лепестка ДН в вертикальной плоскости: 20º
Создадим три вибратора длиной 0,5λ. Начальное расстояние между вибраторами примем равным 0,25λ.
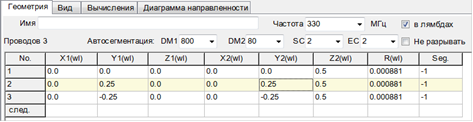

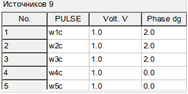
Рис. 1 - Таблица значений х, у, z для первого этажа антенны
Диаграмма направленности имеет вид:
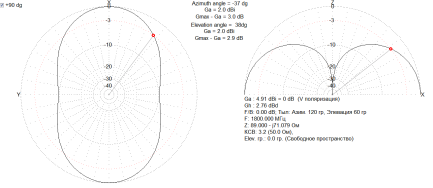
Рис. 2 - Диаграмма направленности антенны
Из рисунка 2 видно, что ширина главного лепестка в вертикальной плоскости не соответствует техническим требованиям. Необходимо увеличить количество этажей антенны, т.к. они определяют ширину ДН в вертикальной плоскости и расстояние между вибраторами.
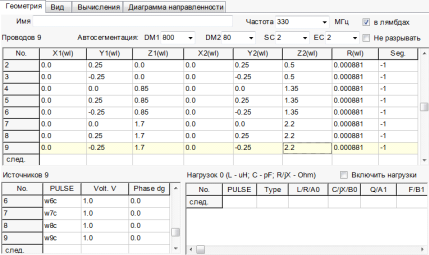
Рис. 3
Диаграмма направленности имеет вид:
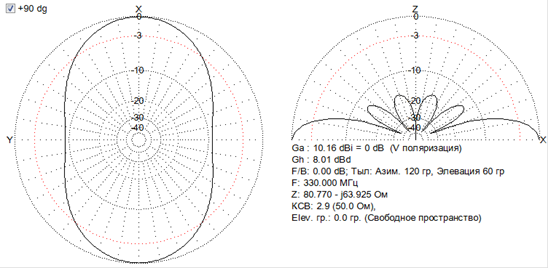
Рис. 4
Ширина главного лепестка ДН в горизонтальной плоскости соответствует заданным требованиям, а ширина главного лепестка ДН в вертикальной плоскости нет. Чтобы добиться нужного результата в вертикальной плоскости, увеличиваем горизонтальное расстояние между вибраторами.
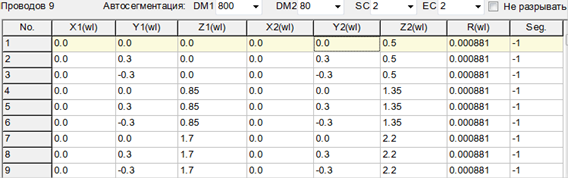
Рис. 5 - Таблица значений х, у, z для трёх этажей антенны
Диаграмма направленности имеет следующий вид:
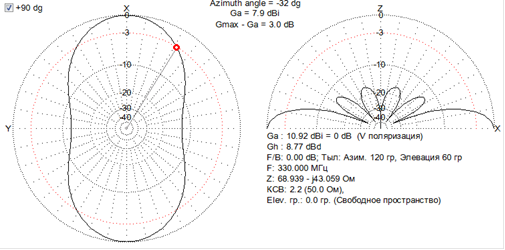
Рис. 6
Антенная решетка соответствует заданным требованиям.
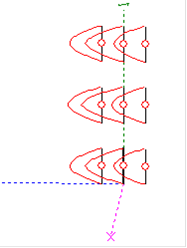
Рис. 7 - Трехмерное изображение моделируемой антенны
. Строим рефлектор, располагая его за антенной решеткой на расстоянии 0,25λ.
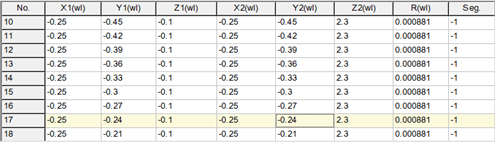
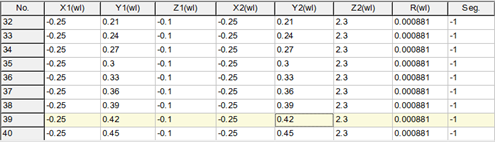
Рис. 8
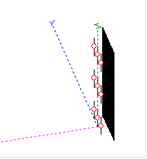
Рис. 9 - Трехмерное изображение антенной решетки с рефлектором
После построения рефлектора ДН в горизонтальной плоскости немного сузилась, поэтому необходимо немного увеличить расстояние между вибраторами.
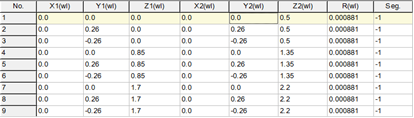
Рис. 10
Антенная решетка соответствует заданным требованиям.
В итоге получаем:
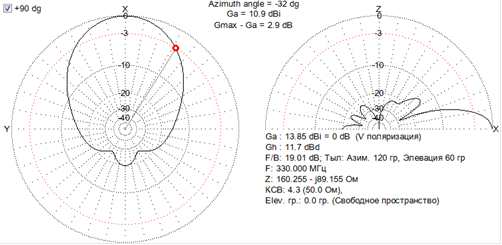
Рис. 11
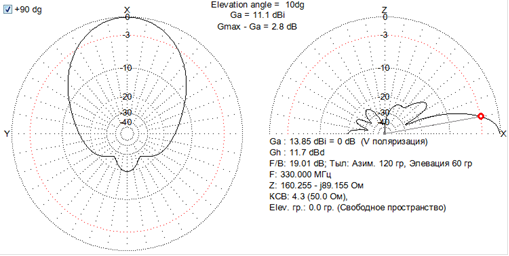
Рис. 12
Уровень бокового излучения: не более -10дБ
Уровень заднего излучения: не более -24дБ, что соответствует заданию.
. Подбираем фазу, чтобы угол наклона главного лепестка ДН в вертикальной плоскости был равен 2º.
Статья в тему
Спектральный анализ аналоговых сигналов и расчет откликов на выходе линейной цепи
Методы математического описания сигналов является базовым курсом в
системе подготовки современного инженера в области радиотехники и
радиоэлектроники. Его целью является изучение фундаментальных закономерностей
связанных с получением сигналов, их передачей по каналам связи, об ...