Осуществить расчет выбранных КУ, используя эквивалентные варианты (последовательные, параллельные, с обратной связью)
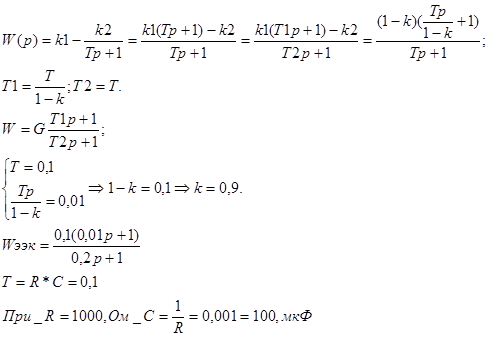
Дифференциальное КУ №1.
Реализуем его с помощью параллельного соединения. По ЛАЧХ корректирующего устройства видно, что Т1=0,1 и Т2=0,01.
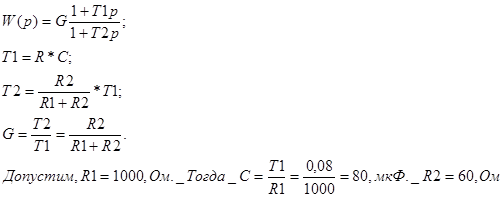
Дифференциальное КУ №2.
Реализуем с помощью параллельной связи. Из ЛАЧХ следует, что Т1=0,08 и Т2=0,005
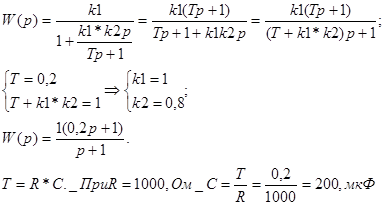
Интегрирующее КУ.
Реализуем на гибкой обратной связи.
Статья в тему
Усилитель мощности звука
Усилитель мощности звука - прибор который усиливает электрические колебания, соответствующих слышимому человеком звуковому диапазону частот. Значит усилители звука должны соответствовать требованию усиления в диапазоне от 20 до 20 000 Гц по частоте, а по уровню -3 дБ. Наилучшие усилители имеют диапа ...