Оценить устойчивость системы по критерию Гурвица, определить Kкр
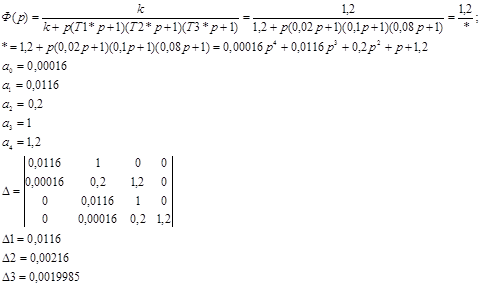
Как видно, необходимое условие устойчивости системы по критерию Гурвица выполняется. Можем выполнять проверку, находя определители матрицы, составленной из коэффициентов многочлена (*). Для проверки необходимо убедиться в положительности n-1 определителя, т.е. для нашей системы 4 порядка нужно найти ![]() . Видим, что все определители положительны. Приравняв
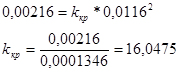
. Видим, что все определители положительны. Приравняв ![]() к 0, можем найти
к 0, можем найти ![]()
Статья в тему
Спектральный анализ аналоговых сигналов и расчет откликов на выходе линейной цепи
Методы математического описания сигналов является базовым курсом в
системе подготовки современного инженера в области радиотехники и
радиоэлектроники. Его целью является изучение фундаментальных закономерностей
связанных с получением сигналов, их передачей по каналам связи, об ...