Электромеханические чувствительные элементы инерциальных навигационных систем (ИНС)
Гироскоп с магнитным подвесом сферического ротора (МСГ). Это еще один тип гироскопа с неконтактным подвесом ротора. Принцип построения такого гироскопа аналогичен ЭСГ, но в нем в качестве поддерживающих сил в подвесе ротора использованы силы магнитного взаимодействия ферритового ротора с полями, создаваемыми статорами магнитного подвеса.
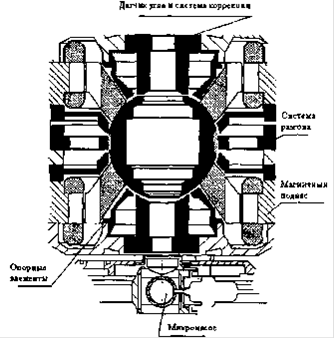
Рис. 1 - Схема МСГ
Схема МСГ показана на рис. 1.
Достоинствами такого гироскопа являются относительная простота реализации пассивного резонансного магнитного подвеса, отсутствие высоких напряжений в системе подвеса, возможность создания корректируемого гироскопа для малогабаритных карданных систем с автокомпенсацией. Подобный тип гироскопа разрабатывается только в России.
К недостаткам МСГ следует отнести малую перегрузочную способность, большое время готовности, проблемы безаварийных посадок ротора.
Поплавковые гироскопы (ПГ). Этот класс гироскопов в 60-80-х годах являлся основным типом ЧЭ, наиболее широко использовавшимся в системах гироскопической стабилизации, навигации и управления.
Принцип подвеса носителя кинетического момента (ротора гиромотора) использует архимедовы силы с непрерывной, гладко распределенной эпюрой поддерживающих сил. Для создания ПГ необходимо разработать камеру с установленным в ней гиромотором, поместить эту камеру в вязкую жидкость, плотность которой равна удельной плотности камеры, снабдить это устройство датчиком угла поворота камеры относительно корпуса гироскопа и датчиком момента.
Для прецизионных ПГ необходима система статирования температуры поддерживающей жидкости. В большинстве применений используются двухстепенные ПГ с цилиндрической поплавковой камерой, которые в зависимости от схемы включения, могут работать как интегрирующие гироскопы, используемые в качестве ЧЭ систем гироскопической стабилизации или, при введении упругой связи при угловом рассогласовании с корпусом, как датчики угловой скорости. Трехстепенные ПГ представляют собой позиционные гироскопы и используются в карданных системах гиростабилизации.
Схема двухстепенного ПГ показана на рис. 2.
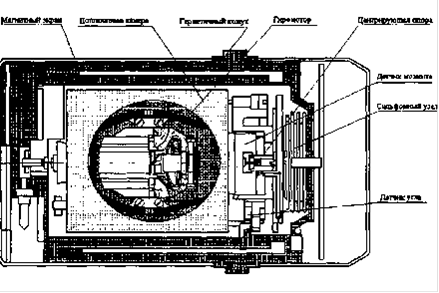
Рис. 2 - Схема двухстепенного ПГ
Эти приборы отличаются высокой надежностью, устойчивостью к механическим перегрузкам, возможностью создания прецизионного управления гироскопом, большим ресурсом. Модели дрейфа таких гироскопов достаточно хорошо изучены и практически используются. К недостаткам таких приборов следует отнести их высокую чувствительность к изменениям внешнего температурного поля, сложность изготовления и, соответственно, достаточно высокую стоимость. Реально достижимая точность ПГ (стабильность дрейфа при горизонтально расположенной оси кинетического момента) без особых усилий и затрат на отработку гироскопов может находиться в пределах 0,002-0,005 град/ч.
Гироскоп с электростатическим подвесом сферического ротора (ЭСГ). Этот тип гироскопа - несомненный лидер в ряду прецизионных гироскопов, точностные характеристики которого подтверждены в последние десятилетия практической реализацией в карданных системах. Практическая задача создания ЭСГ сводится к формированию такого подвеса, созданию систем разгона ротора, демпфирования его нутационных колебаний, стабилизации скорости вращения и съема информации об угловом положении ротора в корпусной (связанной) системе координат. Схема ЭСГ представлена на рис. 3.
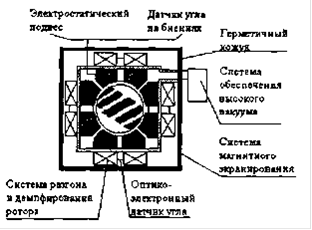
Рис. 3 - Схема ЭСГ
Здесь показаны две возможные раздельно или совместно применяемые системы считывания информации об угловом положении ротора. Несмотря на кажущуюся простоту построения ЭСГ, практическая реализация его принципов требует привлечения и разработки многих технологий высокого уровня. Поэтому такие гироскопы реально разработаны только в США, России и Франции. Потенциальная точность ЭСГ обусловлена влиянием на его погрешности относительно малого числа физических факторов, а также большой стабильностью его параметров. Это позволило с достаточно хорошим приближением решить важную для каждого типа гироскопов задачу - создание модели его дрейфа.
Точность таких приборов в карданных системах с автокомпенсацией и алгоритмической компенсацией с использованием моделей дрейфа в ближайшие годы может приблизится к 10-6 град/ч.
Статья в тему
Устройство управления шаговым двигателем на микроконтроллере
Последние
годы отмечены массовым наполнением рынка всевозможной автоматизированной
аппаратурой самого различного назначения и самой различной сложности от
пластиковой платежной карточки до холодильника, автомобиля и сложнейших
установок. Это стало возможным благодаря микроконтроллера ...