Описание работы системы, ПФ ее элементов
Пример электромеханической следящей системы показан на рис.1.
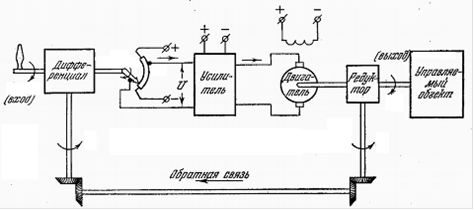
Рис. 1.
Принцип её действия следующий. На входе вращением рукоятки задается произвольный закон для угла поворота во времени ![]() . Тот же самый закон угла поворота во времени должен быть автоматически воспроизведен на выходе системы, т.е. на управляемом объекте:
. Тот же самый закон угла поворота во времени должен быть автоматически воспроизведен на выходе системы, т.е. на управляемом объекте: ![]() . Для этой цели угол поворота на выходе
. Для этой цели угол поворота на выходе ![]() передается при помощи вала обратной связи на вход системы, где он вычитается из задаваемого угла
передается при помощи вала обратной связи на вход системы, где он вычитается из задаваемого угла![]() . Это вычитание осуществляется при помощи механического дифференциала. Если угол на выходе
. Это вычитание осуществляется при помощи механического дифференциала. Если угол на выходе ![]() не равен углу входе
не равен углу входе ![]() , то третий валик дифференциала повернется на разность этих углов
, то третий валик дифференциала повернется на разность этих углов ![]() - рассогласование. Пропорциональное ей напряжение U подается через усилитель на приводной двигатель, который вращает выходной вал системы. Если же
- рассогласование. Пропорциональное ей напряжение U подается через усилитель на приводной двигатель, который вращает выходной вал системы. Если же ![]() =
=![]() , то двигатель обесточен и вращения не будет. Следовательно, система все время работает на уничтожения рассогласования
, то двигатель обесточен и вращения не будет. Следовательно, система все время работает на уничтожения рассогласования ![]() , решая, таким образом, задачу воспроизведения на выходе и2 произвольно задаваемой на входе величины
, решая, таким образом, задачу воспроизведения на выходе и2 произвольно задаваемой на входе величины ![]() . Такая система позволяет при незначительной мощности на входе управлять любыми мощными или тяжелыми объектами.
. Такая система позволяет при незначительной мощности на входе управлять любыми мощными или тяжелыми объектами.
Усилитель, показанный на рис.1, функционально можно разделить на линейный усилитель и релейный усилитель с соответствующей статической характеристикой.
По принципиальной схеме рис.1 составим структурную схему электромеханического релейного следящего привода, где обозначено:
![]() - углы поворота командной и исполнительной осей соответственно;
- углы поворота командной и исполнительной осей соответственно;
![]() - рассогласование (ошибка);
- рассогласование (ошибка);
![]() - напряжение на выходе чувствительного элемента;
- напряжение на выходе чувствительного элемента;
![]() - напряжение на выходе линейного усилителя;
- напряжение на выходе линейного усилителя;
![]() - напряжение на выходе релейного усилителя;
- напряжение на выходе релейного усилителя;
![]() - угол поворота двигателя.
- угол поворота двигателя.


Исходные данные:
k1=60 В/рад - крутизна статической характеристики чувствительного элемента;
k2=2 - коэффициент усиления линейного усилителя;
![]() с - постоянная времени линейного усилителя;
с - постоянная времени линейного усилителя;
![]() - коэффициент передачи двигателя
- коэффициент передачи двигателя
 , рад*В-1*с-1,
, рад*В-1*с-1,
где ![]() В - максимальное напряжение на выходе релейного усилителя,
В - максимальное напряжение на выходе релейного усилителя,
![]() об/мин - скорость холостого хода,
об/мин - скорость холостого хода,
тогда получим значение:
 рад*В-1*с-1;
рад*В-1*с-1;
 − электромеханическая постоянная времени двигателя,
− электромеханическая постоянная времени двигателя,
где J=1,0*10-6 кг/м2 - момент инерции всех вращающихся частей, приведенный к валу двигателя,
Статья в тему
Аналитический расчет усилителя напряжения низкой частоты на биполярных транзисторах
каскад транзистор мощность усилитель
Несмотря на все более расширяющееся использование машинных методов схемотехнического проектирования современной электронной аппаратуры, в повседневной практике разработчикам электронных схем приходится вначале решать задачи приближенного расчета типовых узлов и ...