Подбор корректирующего устройства
tср = tс1+tс2+tL1 =10-7+5·10-3+0,46=0,47 с.
Вывод: была разработана программа коррекции для микропроцессора на языке Assembler и рассчитано корректирующее устройство на RLC цепочках.
Заключение
Разработанное устройство отвечает требованиям технического задания. С помощью анализа системы был выявлен недостаток - несоответствие ЛАЧХ системы с типовой ЛАЧХ, обеспечивающей наиболее оптимальные показатели качества САУ. С помощью метода синтеза было разработано корректирующее устройство, приводящее систему к устойчивому виду. В качестве КУ может быть использовано как RC - цепочка, так и управляющая программа на языке Assembler. Поскольку в САУ имеется МП, то для наиболее полного использования его возможностей, предпочтительней КУ реализовывать в качестве рабочей программы, так как время обрабатываемых микропроцессором сигналов (1,12 мс) меньше времени обработки сигналов корректирующим устройством в виде RLC - цепочки (0,47 с). В настоящее время систему автоматического управления громкостью звука можно успешно применять, в бытовой технике, например в телевизорах или телефонах. При этом обеспечится необходимый уровень громкости в устройстве, в зависимости от уровня зашумленности.
Приложения
Приложение А
Функциональная схема САУ громкостью звука
|
х - входной сигнал; |
М1 - источник звука (микрофон); |
|
у - выходной сигнал; |
ПУ1, ПУ2 - промежуточные усилители; |
|
ξ - возмущающее воздействие; |
МП - микропроцессор; |
|
λ - управляющее воздействие; |
УМЗЧ - усилитель мощности звуковой частоты; |
|
АС - акустическая система; | |
|
М2 - датчик шума (микрофон); |
Технические характеристики системы
напряжение питания, В 220;
потребляемая мощность, Вт 100;
максимальная мощность выходного сигнала, Вт 25;
габаритные размеры (без учета акустической системы), мм 500´200´50;
масса (без учета выносной акустической системы), кг не более 3;
точность, % не более 2;
температурный диапазон, °С от минус 10 до +50;
гарантийный срок эксплуатации, лет 3.
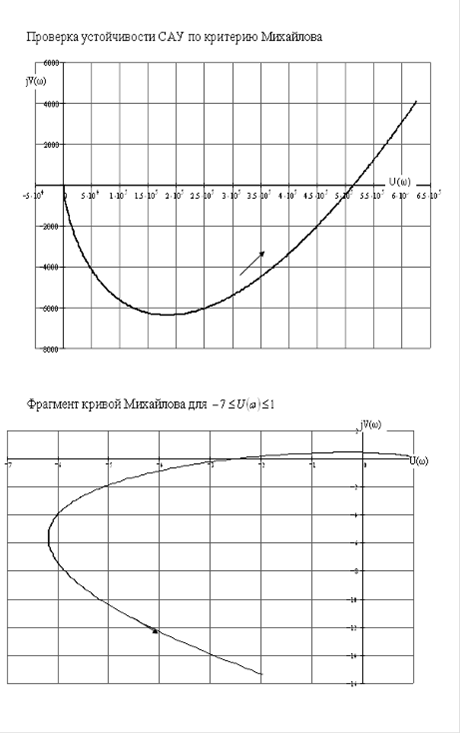
Устойчивость САУ громкостью звука
Переходный процесс САУ громкостью звука
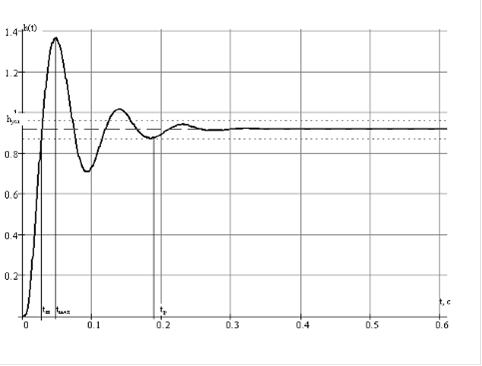
установившееся значение выходной величины: ![]()
перерегулирование, %: ![]()
колебательность системы,: ![]()
время нарастания, с: ![]()
достижения максимального значения, с: ![]()
время регулирования, сек: ![]()
ЛАЧХ, ФЧХ, ЖЛАЧХ, ЖФЧХ, ЛАЧХ КУ САУ ГРОМКОСТЬЮ ЗВУКА
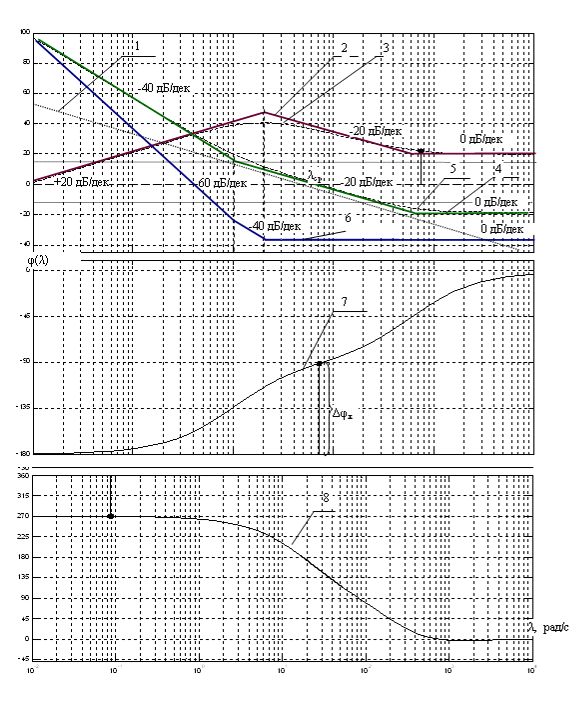
1 - Граница запретной зоны
- Аппроксимированная ЛАЧХ
- Реальная ЛАЧХ4 - Аппроксимированная ЖЛАЧХ
- Реальная ЖЛАЧХ6 - ЛАЧХ КУ
- ЖФЧХ8 - ФЧХ
Подбор корректирующего устройства
Передаточная функция корректирующего устройства:
![]()
Статья в тему
Строительство волоконно-оптической линии связи на участке Чулым–Колывань
Опыт строительства ВОЛС в России и странах СНГ выявил ряд существенных отличий в организации, технологии поведения линейных и монтажных работ по сравнению с работами на традиционных электрических кабелях связи. Эти отличия в значительной степени обусловлены тем, что у ОК в отличие от электри ...