Расчет сумматора
R2 = R2const + R2var_d2 = 1890 + 471.172 = 2.361172 кОм (6.6.10)
В MicroCAP задаем для R2const значение "S5-54V+", а для R2var - значение "SP5-40A+" атрибута MODEL
Выбираем ОУ DA1 - OP-07E.
Для минимизации смещения ОУ по постоянному току рассчитаем R4:
 (6.6.11)
(6.6.11)
Выбираем R4:
R4 = 657 Ом
Тип: С2-29В,Pном-0.125 Вт, ряд E192, допуск 0.1%, группа ТКС -"А":
+-75E-6 [1/0С] при t = (-6 .+20)0С
+-25E-6 [1/0С] при t = (+20 .+155)0С.
Расчетные значения крайних точек диапазона полезного сигнала на выходе сумматора с учетом выбранных номиналов:
Uсум_min = Uinmin∙R3/R1 - Uref∙R3/R2 = -1.7238∙10-4 В (6.6.12)
Uсум_max = Uinmax∙R3/R1 - Uref∙R3/R2 = 9.9999 В (6.6.13)
Расчетный диапазон изменения полезного сигнала на выходе сумматора составит:
ΔUсум = Uсум_max - Uсум_min = 9.9999 - (-1.7238∙10-5) = 10.0001 В (6.6.14)
Диапазон изменения сигнала на выходе сумматора по результатам "автономного" моделирования при температуре ИП 27 0С (Transient-анализ MicroCAP, рис. 25):
Uсум_150 = 0,0003 В
Uсум_250 = 10,0001 В
ΔUсум_avt = Uсум_250 - Uсум_150 = 10,0001 - 0,0003 = 9,9998 В
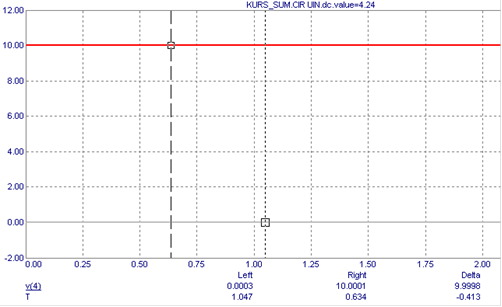
Рис. 25. Диапазон изменения сигнала на выходе сумматора по результатам "автономного" моделирования при температуре ИП 27 0С (Transient-анализ MicroCAP)
Диапазон изменения сигнала на выходе сумматора по результатам моделирования в общей схеме при температуре ИП 27 0С (Transient-анализ MicroCAP, рис. 26, 27):
Uсум_150 = -0,0006 В
Uсум_250 = 9.9907 В
ΔUсум_all = Uсум_250 - Uсум_150 = 9.9908 - 0,0004 = 9.9913 В
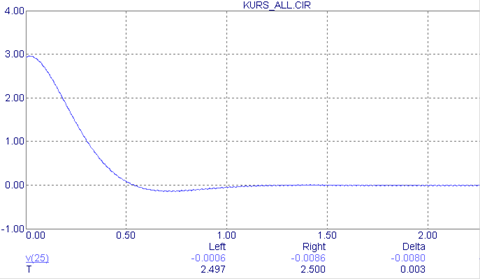
Рис. 26. Сигнал на выходе сумматора по результатам моделирования в общей схеме при температуре 1500С (Transient-анализ MicroCAP)
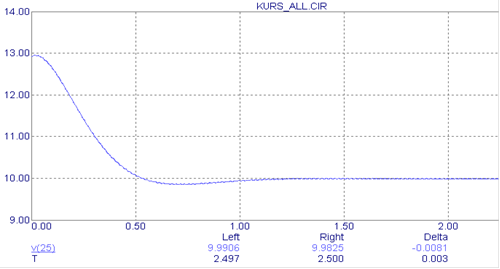
Рис. 27. Сигнал на выходе сумматора по результатам моделирования в общей схеме при температуре 250 0С (Transient-анализ MicroCAP)
Промежуточный вывод: по результатам моделирования при комнатной температуре 27 0С видно, что напряжение на выходе сумматора Uсум содержит приведенные аддитивную и мультипликативную погрешности:
 (6.6.15)
(6.6.15)
 (6.6.16)
(6.6.16)
.7 Расчет выходного преобразователя "напряжение-ток" (ПНТ)
В качестве ПНТ, формирующего унифицированный токовый сигнал (0 .5) мА используем схему Хауленда (рис. 28).
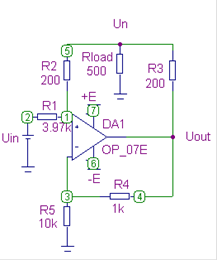
Рис. 28. Схема ПНТ
Входное напряжение ПНТ снимается с выхода сумматора: Uin = 10 В.
Согласно ГОСТ 26.011-80 (СССР), для средств измерений и автоматизации в случае формирования токовых сигналов в пределах значений (0 .20) мА, нагрузочное сопротивление следует выбирать величиной 500 Ом.
Поэтому задаемся для расчета ПНТ максимальным сопротивлением нагрузки 500 Ом:
Rnmax = 500 Ом
Iout = 5 мА
Напряжение на нагрузке:
Unmax = Rnmax∙Iout = 500∙0,005 = 2,5 В (6.7.1)
Выбираем коэффициент β: β = Unmax = 2.5
Находим отношение R4/R5:
 (6.7.2)
(6.7.2)
Задаемся номиналом R5:
R5 = 10 кОм
Тип: S5-54V,Pном-0.125 Вт, ряд E192, допуск 0.01%, ТКС:+-10E-6 [1/0С] при t = (-60 .+70) 0С.
Рассчитываем R4:
R4 = R45∙R5 = 0,1∙10000 = 1 кОм (6.7.3)
Выбираем R4:
R4 = 1 кОм
Тип: S5-54V, Pном-0.125 Вт, ряд E192, допуск 0.01%, ТКС:+-10E-6 [1/0С] при tC=(-60 .+70)0С.
Статья в тему
3D-MID области применения и технологии производства
В 80-х годах прошлого века 3D литые монтажные основания (3D molded
interconnect devices, 3D-MID) были провозглашены прорывом в электронике, даже
высказывались ожидания, что они заменят печатные платы. Но тогда прорыва не
произошло, что во многом объяснялось несовершенством технологии ...