Разомкнутые и замкнутые автоматические системы регулирования
При изображении систем управления применяют два принципа - функциональный и структурный принцип и соответственно схемы подразделяются на функциональные и структурные схемы.
Разомкнутые системы автоматического регулирования
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата.
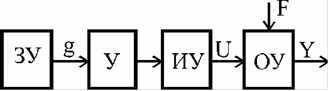
ЗУ - задающее устройство;
У - усилитель;
ИУ - исполнительное устройство;
![]() - задающее воздействие;
- задающее воздействие;
![]() - управляющее воздействие;
- управляющее воздействие;
![]() - выходная величина;
- выходная величина;
![]() - возмущающее воздействие;
- возмущающее воздействие;
ОУ- объект управления.
Рисунок 3.1 - Функциональная схема разомкнутой САР
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления.
Задающее устройство вырабатывает задающее воздействие ![]() , в соответствии, с которым устанавливается управляющее воздействие
, в соответствии, с которым устанавливается управляющее воздействие ![]() . Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько.
. Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько.
Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии ![]() изменение возмущающего воздействия
изменение возмущающего воздействия ![]() вызывает изменение выходной величины
вызывает изменение выходной величины ![]() . Большинство устройств систем управления являются инерционными.
. Большинство устройств систем управления являются инерционными.
Системы автоматического управления по возмущению (системы компенсации)
Разомкнутые системы с управлением по возмущению характерны тем, что управляющий сигнал формируется в зависимости от величины основного возмущающего воздействия. Эти системы предназначены для уменьшения влияния возмущающего воздействия на выходную величину объекта управления путем измерения самого этого воздействия и компенсации его влияния за счет искусственного воздействия на процесс.
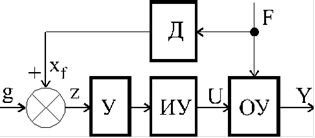
У - усилитель;
ИУ - исполнительное устройство;
![]() - задающее воздействие;
- задающее воздействие;
![]() - управляющее воздействие;
- управляющее воздействие;
![]() - выходная величина;
- выходная величина;
![]() - возмущающее воздействие.
- возмущающее воздействие.
Д - датчик возмущающего воздействия;
ОУ- объект управления;
![]() - сигнал пропорциональный возмущающему воздействию;
- сигнал пропорциональный возмущающему воздействию;
![]() - сигнал на входе усилителя.
- сигнал на входе усилителя.
Рисунок 3.2 - Функциональная схема САР по возмущению
В рассматриваемой системе ![]() . Можно считать, что сигнал
. Можно считать, что сигнал ![]() связан с возмущающим воздействием соотношением
связан с возмущающим воздействием соотношением ![]() , где
, где ![]() - коэффициент передачи датчика.
- коэффициент передачи датчика.
В системах управления по возмущению можно добиться полной компенсации влияния возмущающего воздействия на выходную величину в установившемся режиме работы.
Эти системы должны быстро реагировать на меняющееся возмущающее воздействие, так как изменение сигнала на выходе усилителя происходит одновременно с изменением возмущающего воздействия.
В системах управления на объект действует несколько возмущающих воздействий. Те возмущения, которые не измеряются, будут вызывать изменение выходной величины.
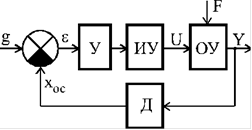
Замкнутые системы автоматического регулирования
В замкнутых САР управляющее воздействие ![]() формируется в непосредственной зависимости от управляемой величины
формируется в непосредственной зависимости от управляемой величины ![]() .
.
Статья в тему
Связь между пропускной способностью линии и ее полосой пропускания
Под каналом связи в сети будем понимать комплекс устройств, обесценивающих перенос сигналов (передачу информации) из одной точки пространства в другую, причем полюсами (концами) канала будем считать либо устройства ввода или вывода информации (абонентскую аппаратуру или устройства сопряжения канала ...