Классификация законов регулирования
Математически этот процесс может быть описан следующей зависимостью:
 (2.5)
(2.5)
где kи=1/Ти - коэффициент пропорциональности интегральной составляющей, а Ти - постоянная времени интегрирования, параметр настройки регулятора.
Если kи ≠ 0, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока ε не станет равным 0.
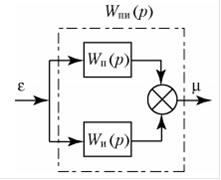
Рисунок 2.2 - Структурная схема идеального ПИ- регулятора
Передаточная функция ПИ-регулятора (по схеме, рис. 2.2):
 (2.6)
(2.6)
При скачкообразном изменении регулируемой величины на значение ε0 ПИ-регулятор со скоростью, определяемой быстродействием привода, перемещает исполнительный механизм на величину (kp·ε0), после чего исполнительный механизм дополнительно перемещается в ту же сторону со скоростью ε0/Ти, пропорциональной отклонению регулируемой величины. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора.
П- и ПИ-регуляторы не могут упреждать ожидаемое отклонение регулируемой величины, реагируя только на уже имеющееся отклонение.
Возникает необходимость в регуляторе, который вырабатывал бы дополнительное регулирующее воздействие, пропорциональное скорости отклонения регулируемой величины от заданного значения
 (2.7)
(2.7)
Такое регулирующее воздействие используется в дифференциальных и ПИД-регуляторах. ПИД-регуляторы воздействуют на объект пропорционально отклонению ε регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины:
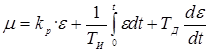 (2.8)
(2.8)
По возможностям ПИД-регуляторы являются универсальными. Используя их, можно получить любой закон регулирования. Структурная схема и закон регулирования идеального ПИД-регулятора приведены на рис. 2.3.
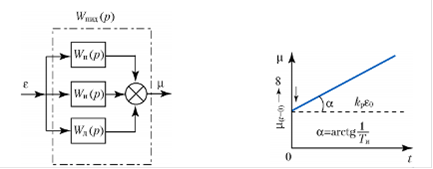
Рисунок 2.3 - Cтруктурная схема ПИД-регулятора (а) и закон ПИД-регулирования (б)
При скачкообразном изменении регулируемой величины ПИД-регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования, затем величина воздействия резко падает до значения, определяемого пропорциональной составляющей, после чего постепенно начинает оказывать влияние интегральная составляющая регулятора. Переходной процесс при этом (рис. 2.4) имеет минимальные отклонения по амплитуде и по времени.
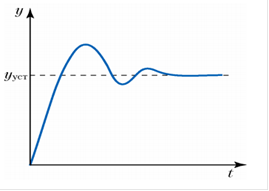
Рисунок 2.4 -Переходной процесс при ПИД- регулировании
Параметрами настройки ПИД-регуляторов являются коэффициент пропорциональности регулятора kp, постоянная времени интегрирования Ти и постоянная времени дифференцирования Тд.
Статья в тему
Синтезатор частоты УКВ радиостанции
Термин контроллер образовался от английского слова to control -
управлять. Эти устройства могут основываться на различных принципах работы от
механических или оптических устройств до электронных аналоговых или цифровых
устройств.
Контроллеры требуются не только для больших систем, ...