Восстановление сигнала по его спектру
Обратное преобразование Фурье для периодической функции выполняется по формуле:

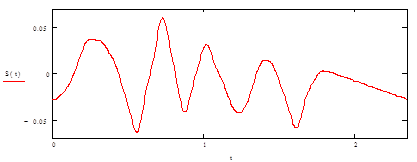
Рисунок 30 - сигнал, восстановленный по первым 25 гармоникам
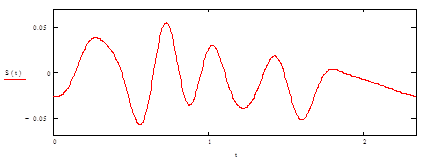
Рисунок 31- сигнал, восстановленный по первым 10 гармоникам
Статья в тему
Автоматизация управление асинхронным электроприводом
Автоматизация - это комплексная конструктивно-технологическая задача
создания принципиально новой техники на базе прогрессивных процессов обработки,
контроля, сборки.
Автоматизация технологических процессов есть совокупность мероприятий по
разработке новых технологических проце ...