Математическое моделирование регулирования частоты
Частотное регулирование скорости асинхронного двигателя электропривода осуществляется изменением частоты и напряжения питающего двигатель.
Типовая структурная схема универсального электропривода на базе асинхронного двигателя состоит из самого двигателя, преобразователя частоты, включающего инвертор тока или напряжения с широтно-импульсной модуляцией (ШИМ), датчиков тока, напряжения, скорости, системы управления реализованной программно на микроконтроллере. Преобразователь частоты включает в себя неуправляемый выпрямитель и инвертор на силовых транзисторных модулях IGBT или BJT - типа. В качестве электродвигательного устройства в разрабатываемом электроприводе используется асинхронный двигатель с короткозамкнутым ротором. Для получения структурной схемы асинхронной машины необходимо выполнить математическое описание переходных процессов, протекающих в ней. Моделирование привода с частотным управлением проводилось с асинхронным двигателем, номинальной мощностью 4 кВт, напряжением 380В и синхронной частотой вращения 1500 об/мин. Схема модели представлена на рис 4.
На рис 5 приведены графики переходных процессов в приводе с "вентиляторной" нагрузкой. В приводе осуществлялся пуск двигателя с номинальным моментом до номинальной скорости, и сброс нагрузки. Моделирование, для ускорения процесса счета, проводилось в режиме Accelerator. Исследование переходных процессов, протекающих в электроприводе, проводились на персональном компьютере с помощью пакета прикладной программы MATLAB 6.5 в соответствии со схемой, представленной на рис 4.
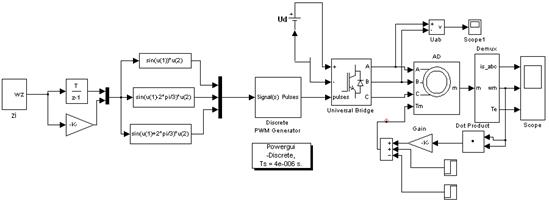
Рис 4 - Схема моделирования привода с частотным управлением U/f=const
Заданные значения сравниваются с измеренными через звено нечувствительности и П-регулятор (выбранный на основе моделирования так, чтобы ток двигателя при пуске не был больше заданного значения). В качестве задатчика интенсивности используется апериодическое звено первого порядка с постоянной времени τ=2.
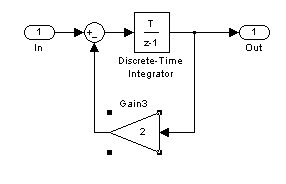
Рис 5- Схема задатчика интенсивности
Алгоритм управления U/f= const c IR-компенсацией, которая выполнялась на основе начального задания U.
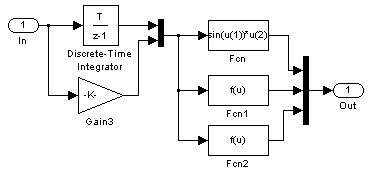
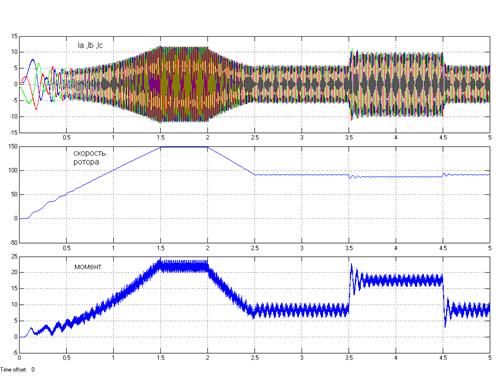
Рис 6 - Переходные процессы в приводе при пуске, наборе и сбросе нагрузки
Электропривод с частотным преобразователем обеспечивают:
· пуск по заданному алгоритму;
· длительная работа в заданном диапазоне частот вращения и нагрузок;
· реверс;
· торможение и останов по заданным алгоритмам;
· регулирование технологического параметра за счет встроенного ПИД-регулятора;
· защита АД и технологического оборудования в аварийных и нештатных режимах;
· сигнализация, отображение и дистанционная передача информации о параметрах и режимах работы;
· учет отработанного времени, регистрация отказов, нештатных и аварийных режимов.
· Предусматривают работу в ручном и автоматическом режимах.
Статья в тему
Определение номера абонента в телефонной сети и его вычисление в десятичной системе
По списочному номеру абонента (100001) определить данный номер в
станционном логическом виде по файлу 63Н и вычислить его в десятичной системе.
Измерим абонентскую линию набором директивы:
PLM : SUB = 100001,
Для вывода данных о нумерации абонента набираем директиву:
...