Активный держатель монтажных оснований, устанавливаемый в стандартный автомат 2D-установки компонентов
Наконец, четвертым из рассматриваемых вариантов является активный держатель монтажных оснований, оснащенный многоосевыми манипуляторами. Он предназначен для модернизации существующих автоматов установки компонентов и устанавливается на конвейер подобно обычной ПП. Манипулятор содержит одну или несколько отдельных позиций для размещения и фиксации устройств 3D-MID при сборке.
Примером такого манипулятора может служить спроектированное для автомата Siplace HF устройство, предлагаемое группой разработчиков из немецкого Университета Александра Фредерика городов Эрланген-Нюрнберг (Friedrich Alexander University of Erlangen-Nuremberg) в рамках исследовательского проекта, финансируемого Ассоциацией 3-D MID e. V. Схема работы манипулятора представлена на Рис. 8.
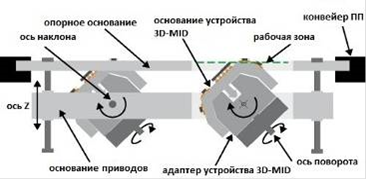
Рис. 8 Схема активного держателя монтажных оснований c манипуляторами
Конструкция манипулятора включается в себя два основания - одно перемещается и фиксируется на конвейере автомата, второе служит для размещения приводов (Рис. 9) с зубчатыми передачами. Исполнительная часть манипулятора, таким образом, размещается под конвейером и реализует три оси: наклон вокруг оси X, поворот вокруг оси Z и подъем по оси Z. Реализуемые манипулятором степени свободы обеспечивают сборку на внешней поверхности полусферы без возникновения проблем, связанных со столкновениями с элементами сборочной головки. Манипулятор оснащен контроллером для управления приводами и связи с системой управления автомата. Во время позиционирования манипулятора автомат находится в режиме ожидания, либо может осуществлять захват компонентов из питателей.

Рис. 9. Изображение и принцип действия активного держателя монтажных оснований
Манипулятор перемещается по конвейеру автомата установки компонентов и закрепляется в пространстве рабочей зоны автомата с помощью его механизмов фиксации (Рис. 10). Установка устройств 3D- MID в гнезда манипулятора требует применения специальных адаптеров.
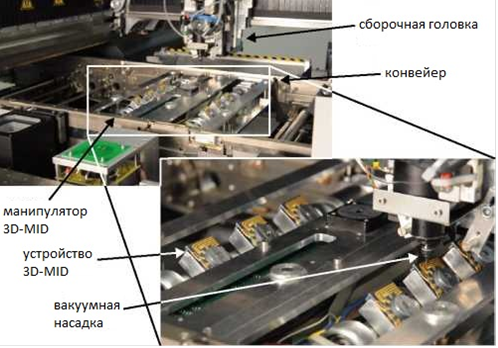
Рис. 10. Внешний вид установленного в автомат Siplace HF активного держателя монтажных оснований
Погрешности расположения контактных площадок на монтажном основании, а также погрешности позиционирования устройства 3D- MID с помощью манипулятора могут компенсироваться при наличии реперных знаков на каждом рабочем слое устройства 3D- MID.
Статья в тему
Синтез блока управления операции сложения в арифметико-логическом устройстве
Абстрактный синтез включает в себя разработку алгоритма работы автомата и
составление его формального описания в виде автоматных таблиц или в виде графа
переходов. Алгоритм наиболее удобно и наглядно представлять в виде блок-схем.
Разработка алгоритмов и блок-схем является наиболее тв ...