Система регулирования печи
автоматизация печь микропроцессорный контроллер
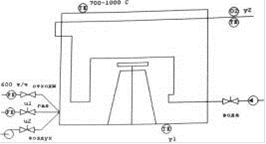
Объектом автоматизации является печь для сжигания органических отходов. Как видно из рисунка 1, в топку печи через регулирующие органы подаются отходы, воздух и газ. Причем наносить управляющие воздействия можно при помощи регулирующих органов, изменяя расход газа либо воздуха. Отходы в свою очередь подаются с постоянным расходом в 600 т/ч.
Через топочную камеру проходит трубопровод, в котором течет теплоноситель (вода).
) регистрирующего аналогового прибора КСП;
) 3-х вольтметров типа М900;
) 3-х миллиамперметров типа М906;
) измерительных и нормирующих преобразователей;
) регулирующего органа и исполнительного механизма типа МЭО;
) передающего устройства БУЭР;
) информационно-вычислительной системы (ЭВМ);
) объекта управления (в качестве 2-х операционных усилителей;
) блока управления электродвигателем типа БУ21;
) задающего устройства типа ЗУ11;
) устройства рассогласования сигналов.
) регулирующего прибора типа MaxyCon Flexy.
Вольтметры и амперметры служат для контроля напряжения и тока в различных местах цепи АСР. Аналоговый регистратор типа КСП необходим как для контроля так и для регистрации напряжения и тока в различных местах цепи АСР; для «снятия» кривых разгона объекта управления так и переходных процессов регулирования. Устройство рассогласования сигналов служит как датчик хода исполнительного механизма.
Блок управления электродвигателем типа БУ21 служит для задания режима работы исполнительного механизма (может работать в ручном, т.е. исполнительный механизм работает от нажатия кнопок Больше / Меньше; автоматическом - работой исполнительного механизма управляет регулятор; внешнем режиме - управляющие воздействия передаются извне).
Регулирующий прибор типа MaxyCon Flexy служит для управления технологическим объектом, который по данным выхода объекта и задания вырабатывает через заданный закон регулирования управляющее воздействия для подавления возмущений. Регулятор является свободно программируемым, т.е. есть возможность реализовать различные типы регуляторов, по мимо стандартных П/ПИ/ПИД.
- Выбор и обоснование контролируемых технологических переменных
- Выбор и обоснование методов измерения технологических переменных
- Выбор средств измерительной техники и автоматики
- Описание принципиально электрической схемы соединений
- Описание лицевой панели управления учебного стенда
Статья в тему
Внедрение и использование GPS-трекеров в среде предприятия
Трекер - устройство приёма-передачи-записи данных для
спутникового мониторинга автомобилей, людей или других объектов, к которым оно
прикрепляется, использующее Global Positioning System для точного определения
местонахождения обьекта. Сферы применения GPS-мониторинга транспорта: скорая
...