Синтез параллельного корректирующего устройства
Задача синтеза, возникающая при проектировании системы автоматического регулирования, заключается в таком выборе структурной схемы системы и технических средств ее реализации, при котором обеспечиваются требуемые динамические и эксплуатационные свойства всей системы в целом.
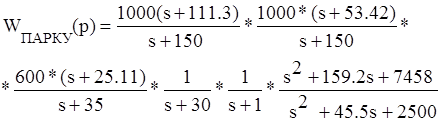
Для нашей системы определяющим параметром является точность, так как робототехнический орган - захват, необходим для удержания объекта и не должен приводить к его порче. Передаточная функция необходимого КУ была найдена на предыдущем этапе, теперь требуется определить структурную схему КУ, его элементную базу и параметры необходимых элементов. Сеяный песок в Удельная покупают россыпью с ближайшего карьера.
Для синтеза аппаратного корректирующего устройства будем применять RC-цепочки, согласно (58). Но для упрощения разобьем наше КУ на два последовательных
 (59)
(59)

Рисунок 15 - Первый каскад корректирующего устройства
Рисунок 16 - Второй каскад корректирующего устройства
Для получения требуемого коэффициента усиления были поставлены 3 операционных усилителя, в качестве которых могут быть использованы усилители типа: К153УД4 и LM301A.
Выберем емкости конденсаторов для 1, 2 и 3 звеньев первого каскада:
C1=С2=С3=20 нФ, т.е.  (кОм),
(кОм),
 (кОм)
(кОм)
 (кОм),
(кОм),
 (кОм)
(кОм)
 (мОм),
(мОм),
 (кОм)
(кОм)
Выберем емкости для второго каскада: С3=С4=100мФ
 (Ом)
(Ом)
 (Ом)
(Ом)
Для последнего звена: C7=10мкФ, C6=20мкФ, L1=200Гн.
 (Ом)
(Ом)
![]() (Ом)
(Ом)
На рисунке 14 представлена функциональная схема с корректирующим устройством.
Рисунок 17 - Функциональная схема САУ захватом руки робота манипулятора
Построим для системы с корректирующим устройством переходный процесс и определим показатели качества.
Переходный процесс строится с использованием функции step(w) пакета MatLab и представлен на рисунке 18.
Из графика видно, что процесс позиционирования захвата значительно улучшился. За 4 секунды захват способен осуществить позиционирование (10 секунд по техническому заданию). Кроме того, отсутствуют колебания.
Из всего сказанного можно сделать вывод, что коррекция системы проведена успешно, корректирующее устройство справляется со своей задачей. Система увеличила запасы устойчивости, исчезла колебательность.
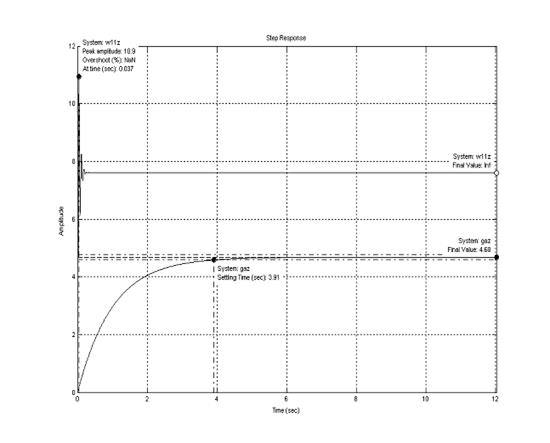
Рисунок 18 - Переходный процесс скорректированной и исходной системы
Статья в тему
Создание современной телекоммуникационной сети в Краснодарском крае
Сегодня совершенно очевидно, что научно-технический прогресс во многом определяется скоростью передачи информации, и ее объемом. Возможность резкого увеличения объема передаваемой информации наиболее полно реализуется в результате применения волоконно-оптических кабелей связи, которые по сравнению с ...