Построение переходной характеристики
Построим переходную характеристику для замкнутой системы, согласно (48), для чего воспользуемся функцией step(Wzz) пакета MatLab.
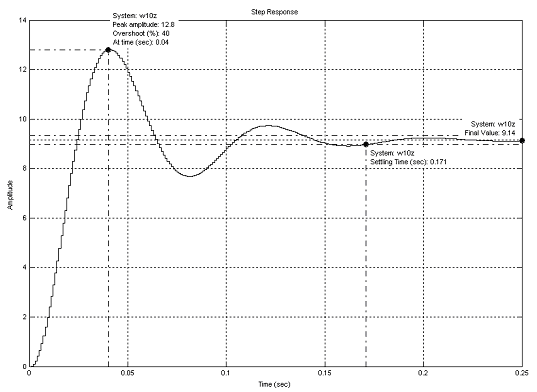
Рисунок 11 - Переходный процесс непрерывной системы
Из графика можно определить следующие характеристики:
. Время регулирования tp=0.158 c
. Перерегулирование σ=(10.9-7.61)/10.9=30 %
Из графика переходного процесса видно, что быстродействие системы более чем достаточное, однако присутствует большое перерегулирование, что в моей системе не допустимо. Таким образом, требуется установка корректирующего устройства.
Статья в тему
Цифровые устройства и микропроцессоры
Современный этап развития вычислительной техники характеризуется разработкой микропроцессорных средств. Микропроцессоры (МП) используются в качестве элементной базы для реализации устройств обработки данных. При этом каждая сфера применения МП предъявляет свои специфические требования к и ...